使用ATtiny13A制作能用纽扣电池驱动的吸顶灯遥控器【准备篇】
Back to Top为了覆盖更广泛的受众,这篇文章已从日语翻译而来。
您可以在这里找到原始版本。

在这一年中,工作上使用C#进行开发,依托充足的开发环境以及CPU和内存资源,并不追求速度和内存效率,而是采用「富豪的プログラミング」来开发。
另一方面,在私下我也利用Arduino进行了各种电子制作,并一直乐在其中。于是我便想到,
「微控制器的规格完全没有发挥到极致啊」
。
这种仅有一颗芯片、可以放在手掌中的微控制器,以前我做的作品都没有太在意速度、程序大小和数据大小等问题。可用的引脚也多得很,微控制器内部功能也仅仅用了其中1到2项,以至于没有那种将性能发挥到极限的成就感。即使在Arduino上,我也采用了「富豪的プログラミング」。
因此这次虽然背道而驰,但以
「将硬件性能发挥到极限,用低预算制作一些实用的东西」
为主题,挑战制作吸顶灯(LED照明)的遥控器。
由于文章内容较多,所以分为【准备篇】、【开发篇】、【基板・外壳制作篇】来描述。整个过程既是制作备忘录,也记录了我的制作历程。
ATtiny13A概述
#虽然Arduino有各种不同的型号,但Arduino Uno R3使用的是名为ATMega328P的微控制器。AT代表开发该微控制器的Atmel公司[1],而Mega则意味着“大”。没错,虽然叫做微控制器,但其中的CPU却是“大”级别的。当我寻找适用于Arduino开发环境的更小型(Tiny)的微控制器时,就发现了ATtiny13A。
ATtiny13A的主要规格
#摘自ATtiny13A的数据手册中的部分内容[2]
| 项目 | 规格及概述 |
|---|---|
| CPU | AVR 8位微控制器 |
| 时钟频率 | 最大20MHz |
| 工作电压 | 1.8-5.5V |
| 闪存 | 非易失性存储器(高速·大容量)1024字节(程序存储区域) |
| EEPROM | 非易失性存储器(低速·小容量)64字节(数据存储区域) |
| SRAM | 易失性存储器(高速)64字节(工作内存) |
| 定时器 | 1个8位定时器 |
| 模拟数字转换 | 4通道 10位 |
AVR微控制器采用所谓的哈佛架构,即程序指令和数据在物理上是分开的,所以在编写程序时必须关注程序大小和数据大小。
由于ATtiny13A能够在1.8V下工作,所以可以用钮扣电池(3V)供电。程序容量仅限于闪存的1024Byte,数据容量仅有SRAM的64Byte。在这有限的空间内如何编写程序便成为关键所在。
顺便提一句,顶部图片中为了表现ATtiny13A的体积感,将其与单4电池放在一起拍摄。该图片尺寸为135KByte(139190Byte),大约是ATtiny13A闪存1024Byte容量的135倍。仅仅1024Byte的容量能否写出遥控器程序,让我有些担心。
程序以C/C++编写(也可使用汇编语言)。由于SRAM只有64Byte,所以字符串数据(ASCII)最多只能使用64个字符,插入调试语句会消耗宝贵的程序容量和数据容量,从而无法放心使用。而且硬件上也并不支持调试输出(UART)🫠
引脚布局
#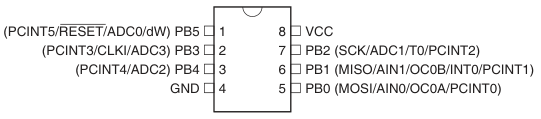
ATtiny13A共有8个引脚,从左上角开始,逆时针依次编号1到8。
其中pin8用作电源,pin4连接GND,因此功能分配在除1和4之外的其他6个引脚(1~3及5~7)。
每个引脚除了作为表示输入输出端口的PB(共有0到5的6个)外,还可以分配上表中提到的其他功能中的一项。
例如,pin6可以使用INT0,而INT0代表外部中断。
将开关或按钮接在pin6上,当其状态发生变化时,就可以调用外部中断处理函数。
此外,ADC0至ADC3在各自的引脚上均可使用。ADC功能用于读取模拟值(电压值),并转换为10位(1024级)数值。
需要注意的是,每个引脚可以使用的功能各不相同。
如果使用Arduino的API,配置会非常简单。但在ATtiny13A上使用Arduino API会导致程序体积增大,迅速超过1024Byte,因此不可行,所以只能直接操作寄存器来分配各功能。
寄存器操作
#寄存器是用于保存微控制器状态或者在更改引脚分配时使用的区域,程序(C、C++、汇编)可以直接读取或设置寄存器的值。从程序来看,它们就像指向内存地址的普通变量一样。
寄存器示例
| 寄存器 | 寄存器名称 | 说明 |
|---|---|---|
| DDRB | B端口方向寄存器 | 设置端口为输入或输出 |
| PORTB | B端口输出寄存器 | 设置端口的开/关 |
| TCCR0A | 定时器/计数器0控制寄存器A | 控制定时器/计数器 |
| OCR0A | 定时器/计数器比较A寄存器 | 设置定时器/计数器的比较值 |
| PRR | 电源节能寄存器 | 与电源节能相关的设置 |
| GIMSK | 通用中断允许寄存器 | 与中断允许相关的设置 |
| PCMSK | 引脚变化中断允许寄存器 | 与引脚中断允许相关的设置 |
直接操作寄存器可以降低程序体积,实现低层级的操作。但代价是会使程序对微控制器产生依赖,同时由于需要查阅数据手册来编写程序,工作量也会增加。
每种微控制器的引脚布局和寄存器都可能不同。Arduino API在内部屏蔽了这些寄存器操作上的差异,从而可以用相同的函数来控制各种微控制器。但缺点是头文件中的预处理器分支(#if、#ifdef、#define)太多,看起来比较复杂。
通信格式
#红外线发送有多种标准,很多厂商和企业都是按照各自的标准进行红外线发送的。据说在日本常用的有NEC格式、家製協格式和SONY格式。
为了理解通信格式,我参考了以下网站:
通信格式
红外线遥控器的格式
红外线遥控器信号定义数据的合成
38KHz调制脉冲发送示意图
查看客厅吸顶灯遥控器的型号时,发现标记为Panasonic HK9493。因此有必要调查该遥控器采用哪种通信格式发送红外信号。
开发环境准备
#使用Arduino IDE进行开发的设定
#使用Arduino IDE对ATtiny13A进行开发需要以下内容:
- 作为板管理器的
MicroCore - 草图(程序)的写入设备(我使用Arduino Uno)
关于板管理器及安装,请参考下面的内容:
由于Arduino IDE已有不少历史遗留版本,我这里使用的是1.8.19版。
是否能够在Arduino IDE 2.X.X下运行,目前尚不确定。
红外线发送数据的解析
#那么,红外线发送数据该如何获取呢?厂家的官网并没有公开此类信息。
必须利用红外线遥控接收模块,从实际遥控器发送的红外信号中接收数据,并据此解析出通信格式。
Arduino平台上有许多优秀的开源库。
其中有一个名为IRremote的库,可用于红外信号的收发,我正是用它来解析数据的。
我在秋月电子购买了OSRB38C9AA型号的红外线遥控接收模块。参考数据手册[3]中的应用例,我用面包板简单搭建了一下电路。
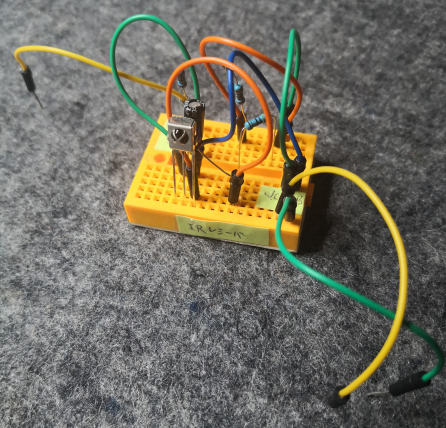
左边的黄色线是红外线接收模块用于输出信号的Output,右边的黄色线为电源,绿色为GND。
那三脚直立的模块就是红外线遥控接收模块。
虽然省略了详细说明,但在Arduino上编写了如下草图,并将之前搭建的面包板连接在一起。
#include <IRremote.h>
int receiverPin = 8;
void setup() {
Serial.begin(9600);
IrReceiver.begin(receiverPin, true);
}
void loop() {
if (IrReceiver.decode()) {
// 显示发送接收到信号所需的代码
IrReceiver.printIRSendUsage(&Serial);
// 以RAW格式显示结果
IrReceiver.printIRResultRawFormatted(&Serial, true);
IrReceiver.resume();
}
}
当遥控器向红外线接收模块发送红外信号时,会输出如下内容:
uint32_t tRawData[]={0x9939522C, 0xA0};
IrSender.sendPulseDistanceWidthFromArray(38, 3450, 1700, 450, 1300,
450, 450, &tRawData[0], 40, PROTOCOL_IS_LSB_FIRST,
<RepeatPeriodMillis>, <numberOfRepeats>);
-3276750
+3450,-1700
+ 450,- 400 + 450,- 400 + 450,-1300 + 400,-1300
+ 450,- 400 + 450,-1250 + 450,- 450 + 400,- 450
+ 400,- 450 + 450,-1250 + 450,- 400 + 400,- 450
+ 450,-1300 + 400,- 450 + 450,-1250 + 450,- 400
+ 450,-1250 + 450,- 450 + 400,- 450 + 400,-1300
+ 400,-1300 + 450,-1300 + 400,- 450 + 400,- 450
+ 400,-1300 + 450,- 400 + 450,- 450 + 400,-1300
+ 450,-1250 + 450,- 400 + 450,- 400 + 450,-1300
+ 400,- 450 + 400,- 450 + 400,- 450 + 450,- 400
+ 400,- 450 + 450,-1300 + 400,- 450 + 400,-1300
+ 450
Sum: 53600
uint32_t tRawData[]={0x9939522C, 0xA0};- 0x9939522C 是接收到的数据
- 0xA0 是校验值
- 对
IrSender.sendPulseDistanceWidthFromArray()函数参数的说明void IRsend::sendPulseDistanceWidthFromArray( // 频率[kHz] uint_fast8_t aFrequencyKHz, // 读头部分发送ON时间[微秒] uint16_t aHeaderMarkMicros, // 读头部分发送OFF时间[微秒] uint16_t aHeaderSpaceMicros, // 数据部分,当发送位值为1时的发送ON时间[微秒] uint16_t aOneMarkMicros, // 数据部分,当发送位值为1时的发送后等待时间[微秒] uint16_t aOneSpaceMicros, // 数据部分,当发送位值为0时的发送ON时间[微秒] uint16_t aZeroMarkMicros, // 数据部分,当发送位值为0时的发送后等待时间[微秒] uint16_t aZeroSpaceMicros, // 发送数据数组 IRRawDataType *aDecodedRawDataArray, // 读头部分发送的位数 uint16_t aNumberOfBits, // 位发送顺序 uint8_t aFlags, // 重复发送时的等待时间 uint16_t aRepeatPeriodMillis, // 重复发送的次数 int_fast8_t aNumberOfRepeats ) - +- 的数字排列表示的是接收时各位(0或1)的持续时间,正是用来计算 IrSender.sendPulseDistanceWidthFromArray() 函数参数的数据。
- “+” 表示接收时间[微秒]
- “-” 表示未接收时间[微秒]
可以看出,+和-交替以固定的时间间隔重复出现。
读头部分的ON/OFF时间为 +3450(8T), -1700(4T),而数据部分的ON时间为 +450(1T),因此可以判断采用的是 家製協格式。
在中间部分,+和-成对出现,其中
- “+在400到450之间且相对应的-也在400到450之间”的配对视为0;
- “+在400到450之间且对应的-在1250到1300之间”的配对视为1。
将这些转换成二进制后,从 LSB(最低有效位)开始读取,并以16进制表示,结果如下:
(+xxx, -xxx)(+xxx, -xxx)(+xxx, -xxx)(+xxx, -xxx) 2進数 16進数
+ 450,- 400 + 450,- 400 + 450,-1300 + 400,-1300 → 0011 C
+ 450,- 400 + 450,-1250 + 450,- 450 + 400,- 450 → 0100 2
+ 400,- 450 + 450,-1250 + 450,- 400 + 400,- 450 → 0100 2
+ 450,-1300 + 400,- 450 + 450,-1250 + 450,- 400 → 1010 5
+ 450,-1250 + 450,- 450 + 400,- 450 + 400,-1300 → 1001 9
+ 400,-1300 + 450,-1300 + 400,- 450 + 400,- 450 → 1100 3
+ 400,-1300 + 450,- 400 + 450,- 450 + 400,-1300 → 1001 9
+ 450,-1250 + 450,- 400 + 450,- 400 + 450,-1300 → 1001 9
+ 400,- 450 + 400,- 450 + 400,- 450 + 450,- 400 → 0000 0
+ 400,- 450 + 450,-1300 + 400,- 450 + 400,-1300 → 0101 A
可以看出,此值与之前的 uint32_t tRawData[]={0x9939522C, 0xA0}; 数据相对应。
将0x9939522C从LSB(最低有效位)开始按位读取后,结果与上面一致,因此在数据发送后,校验值0xA0也是按LSB顺序发送的。
最终,通过38KHz调制按如下步骤发送:
- 读头部分发送(通知即将发送数据)
- 利用 IRsend::sendPulseDistanceWidthFromArray() 的第2个参数的时间发送1,第3个参数的时间发送0
- 数据部分发送
- 将0x9939522C通过 IRsend::sendPulseDistanceWidthFromArray() 的第4到第7参数所规定的时间间隔,从LSB(最低有效位)起依次发送
- 校验值发送
- 按LSB顺序发送0xA0
- 时间间隔与数据部分相同
- 尾部发送(表示数据发送结束)
关键点在于,发送1时,并不是单纯让红外LED点亮450[微秒]后熄灭1300[微秒],而是在点亮期间,LED以38KHz的频率反复闪烁。
也就是说,38kHz的频率对应周期约26[微秒],即每13[微秒]交替点亮和熄灭,在450[微秒]内实现。
在Windows或Linux等操作系统上实现微秒级别的控制相当困难(甚至可能无法实现?),能用一只价值160日元[4]的微控制器做到这一点,真是令人感慨万分。
通过串口通信进行调试
#由于ATtiny13A没有内建硬件UART,所以程序状态的检测较为困难,只能通过简单的LED闪烁来确认。
虽然也可以编写软件UART通信库,但为了调试而仅占用少数引脚的两个用于收发显得相当麻烦,而且UART通信库还会占用大量程序空间。
UART是一种异步全双工的串行数据通信方式。Arduino使用硬件实现UART,在调试微控制器程序时,通常会将UART连接到终端软件中查看程序输出。
为了解决这些问题,Nerd Ralph先生开发并公开了一个非常棒的库。
该库名为BasicSerial3,是专为ATtiny设计、仅用一个引脚实现半双工串行通信的汇编语言库,仅占62Byte。但遗憾的是原链接已失效,于是我从另一个网站获取了BasicSerial3并加以使用。
- 虽然现在已有picoUART这一新产品,但它已从汇编转为C++实现,ROM占用大约增加了一倍。
- 对我来说,BasicSerial3已绰绰有余,所以我找到了一个在Github上利用BasicSerial3的项目来使用。
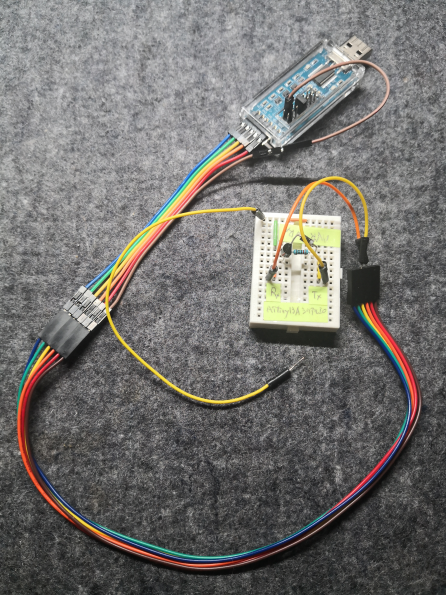
这块白色的面包板展示的就是串口通信电路。将一根黄色导线接到ATtiny13A的PB3(pin2),并将波特率设置为115200。接着,将橙色和黄色的导线分别连接到USB-串口转换适配器的TX/RX端口,再将USB连接到PC上,通过Tera Term等软件进行显示。
由于该USB-串口转换适配器支持DTR信号,所以在自制Arduino兼容机上写入草图时也很方便,有一只就很实用。
接下来,只需编写用于输出字符串和数字的函数,调用它们即可实现UART输出。
// 输出字符串
void serOut(const char* str) {
while (*str) {TxByte (*str++);}
}
// 以10进制输出整数
void OutDEC(uint16_t d) {
int8_t n =-1;
uint16_t v = 10000;
for (uint8_t i=0; i<5; i++) {
if (d >= v) {
TxByte(d/v + '0');
d %= v;
n=i;
} else {
if (n!=-1||i==4) TxByte ('0');
}
v/=10;
}
}
总结
#虽然在查阅资料、收集零件、搭建测试电路以及编写程序上花了不少时间,但制作遥控器的各种技术诀窍几乎都已具备。
虽然目前还没有实物,但我已经获得了一种“应该可以做出来”的感觉。
下一篇将是【开发篇】。