用最前沿的机器人×AI来玩!LeRobot与SO-101体验多模态AI及环境搭建指南
Back to Top为了覆盖更广泛的受众,这篇文章已从日语翻译而来。
您可以在这里找到原始版本。
适合这些人
#- 对多模态AI、物理AI、模仿学习、强化学习等机器人领域的AI感兴趣,但不知道从何入手的人
- 感觉实物机器人价格昂贵,无法尝试的人
- 想动手学习,但想以低成本开始的人
介绍
#在本文中,以开源项目 LeRobot 和开源机械臂 SO-101 为主题,介绍多模态AI相关技术并说明环境搭建的步骤。
最终目标是实现当移动一只机械臂时,另一只机械臂能够同步执行相同动作(参见下方 GIF)。
术语说明
#什么是多模态AI
#在传统的机器人开发中,机器人本体、摄像头、通信协议等多种技术(模态)各自独立运行,且输出的数据格式也不一致,因此将它们整合为一个系统并投入使用并不容易。
近年来,随着以 Transformer 系模型为代表的进展,能够将图像、音频、文本、传感器数据等多种模态整合处理的“多模态AI”研究与实践取得了进展,不同数据格式的处理与整合比以往更为容易。
因此,在机器人领域预期能解决上述问题,基于多模态AI的开发正在逐渐增多。
有一个相似的术语“物理AI”。该术语聚焦于机器人或物理世界中的学习与决策,与多模态AI有较多重叠之处,但在本文中不做区分,一律称为“多模态AI”。
什么是 LeRobot
#官方仓库:LeRobot
![]()
LeRobot 是 Hugging Face 发布的开源机器人库,为真实机器人提供模型、数据集和工具。使用 LeRobot 可以轻松实现多种机器人控制、数据收集和学习工作流的构建。
在本文中,我们重点介绍 LeRobot 的安装与配置,并最终演示如何驱动 SO-101。[1]
什么是 SO-101
#官方仓库:SO-101
 |
 |
|---|---|
| SO101 Follower 的图片。 与实物机器人构造相近。 |
SO101 Leader 的图片。 配有人体操作更便的握柄部分。 |
SO-101 是 RobotStudio 与 Hugging Face 共同开发的低成本开源机器人机械臂,旨在降低机器人领域的入门门槛。
SO-101 由两台机器人机械臂“Leader(先导臂)”和“Follower(从动臂)”组成。一般使用时,用户手动操作 Leader 进行数据采集,Follower 则基于该记录或已训练模型重现相同动作。
本文将介绍 SO-101 的获取方式及在 LeRobot 中驱动其所需的步骤。
运行环境
#由于本文重点在环境搭建步骤,环境需求有所简化。但考虑到 LeRobot 的大多数教程以 CLI 操作为前提,建议操作系统使用 Linux 或 macOS。
为了保持一致性,本文以 Linux 为前提。
将来如果要在 LeRobot 和 SO-101 上进行学习,将需要显存容量在 8GB 以上的 GPU。
以下物品虽非执行本文步骤的必需,但如果具备会更便利:
- 两位以上的插线板:用于向两台机械臂供电。
- 支持两位以上供电的 USB3.0 集线器:用于将两台机械臂连接至电脑。
- 标签贴:方便管理多个电机和零部件。
关于标签贴,推荐使用 Daiso 的 可干净撕下标签贴 525 枚装。该标签贴几乎适用于 SO-101 的所有零件尺寸,可实现如下图所示的标记。
 |
 |
|---|---|
| 使用标签贴对电机进行标记时的图片。 | 使用标签贴对电机总线进行标记时的图片。 |
环境搭建方法
#在此我们将介绍使用 LeRobot 与 SO-101 的环境搭建步骤。
步骤大致如下:
建议事先查看 SO-101 的打印(或购买),并准备好 SO-101 的零件。
LeRobot 的环境搭建方法
#LeRobot 的环境搭建方法参考了 Hugging Face 的 Installation 页面,本文只聚焦于关键步骤。
0.【可选】未安装 conda 相关软件包时
#由于 LeRobot 需要处理多个 Python 软件包,建议使用 Conda 构建虚拟环境。如果尚未安装 Conda,可通过以下命令进行安装:
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
1. 构建虚拟环境
#-
使用 Conda 创建虚拟环境
# 下述的 lerobot 是要创建的环境名称,可根据喜好修改 # 如果修改,请在其他步骤中同样做出相应更改 conda create -y -n lerobot python=3.12 -
激活 Conda 虚拟环境
conda activate lerobot -
在虚拟环境中安装 ffmpeg
conda install ffmpeg -c conda-forge当前版本的 LeRobot 不支持 ffmpeg 8.x,因此请检查上条命令所安装的 ffmpeg 版本:
ffmpeg -version如果此时 ffmpeg 版本为 8.x,请通过以下命令降级 ffmpeg:
conda install ffmpeg=7.1.1 -c conda-forge
2. 安装 LeRobot
#LeRobot 可以从仓库源码或 PyPI 安装。如果希望将来进行个人开发,建议从源码安装以便编辑代码。
如果从源码安装,请执行以下命令:
git clone https://github.com/huggingface/lerobot.git
cd lerobot
# 以可编辑模式安装到 Conda 环境
pip install -e .
如果从 PyPI 安装,请执行以下命令:
pip install lerobot
SO-101 的环境搭建
#1. SO-101 的打印(或购买)
#SO-101 的硬件构成在 官方仓库 中公开。
可以使用仓库中的 3D 数据对零件进行 3D 打印,或从仓库中指引的授权销售网站购买零件套件,以组装 Follower 和 Leader 两只机械臂。
注意:在官方仓库中获取的主要是外壳及机构零件,伺服电机等驱动部件需另行准备。购买电机时,请参考官方仓库中的 Parts For Two Arms (Follower and Leader Setup): 或购买授权销售方的套件。
作为参考,作者本人从官方仓库推荐的秋月电子通商网站购买了以下两款套件。为保持说明一致,以下步骤将以这些零件为基准。
2. SO-101 的设置
#SO-101 的设置参考了 Hugging Face 的 SO-101 页面,本文选取关键步骤进行说明。另外,正如前文所述,SO-101 由 Leader 与 Follower 两台机械臂组成,部分操作会有所不同,请注意。
首先,通过下述命令安装驱动 SO-101 所需的 SDK:
pip install -e ".[feetech]"
2.1. 电机分类
参考链接:Configure the motors
首先将前一节准备的电机分为 Leader 和 Follower 两类。Leader 端由多种齿比的电机构成,而 Follower 端则由相同规格(1/345)的电机构成。
Leader 各关节分配的电机 ID(参见后文)及齿比如下。
| Leader-Arm Axis | Motor | Gear Ratio |
|---|---|---|
| Base / Shoulder Pan | 1 | 1 / 191 |
| Shoulder Lift | 2 | 1 / 345 |
| Elbow Flex | 3 | 1 / 191 |
| Wrist Flex | 4 | 1 / 147 |
| Wrist Roll | 5 | 1 / 147 |
| Gripper | 6 | 1 / 147 |
电机类型可通过机身标签(贴纸)识别。Leader 用电机通常标明齿比,而 Follower 用因规格相同,可能不注明齿比。
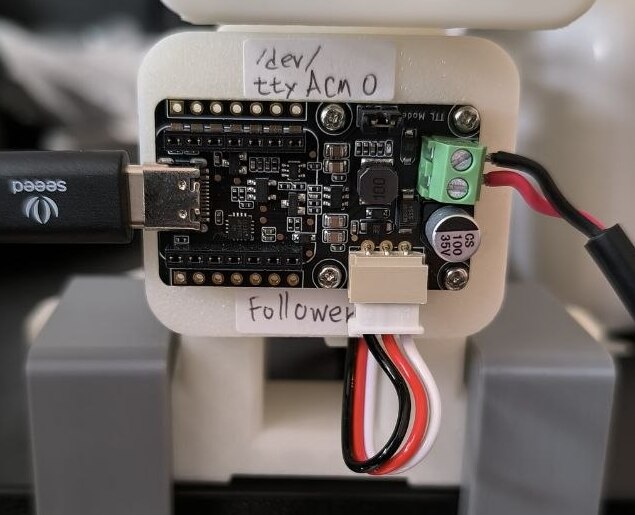
2.2. MotorBus(电机总线)的设置
完成电机分类后,开始配置电机总线(参见下图)。

电机总线是用于统一管理和通信多个电机的设备。
为前节分类的 Leader 用所有电机准备一台电机总线,为 Follower 用所有电机准备另一台电机总线。此时若将 Leader 与 Follower 电机混用会导致后续难以修正,建议在所有电机上贴标签(如标签贴),明确对应到哪台电机总线。
以下步骤中为方便起见,使用以下简称:
- Leader 用电机总线:Leader_MB
- Follower 用电机总线:Follower_MB
-
连接 Leader_MB 和 Follower_MB 的电源,并将其接入电脑。
-
确认各电机总线的 USB 端口。
在同时连接两台电机总线的情况下执行以下命令。
脚本运行过程中会有指示,此时拔下 Leader_MB 的 USB 线并按下 Enter 键。lerobot-find-port示例)脚本输出示例:
Finding all available ports for the MotorBus. ['/dev/ttyACM0', '/dev/ttyACM1'] Remove the usb cable from your MotorsBus and press Enter when done. #(拔下对应的 Leader_MB 数据线并按 Enter) The port of this MotorsBus is /dev/ttyACM0 Reconnect the USB cable. #(重新插入对应的 Leader_MB 数据线)当出现
Reconnect the USB cable.时,请重新插入 Leader_MB 的数据线。在上述示例中,/dev/ttyACM0为 Leader_MB 的端口,请记录该端口。同理,拔下 Follower_MB 的 USB 数据线,确认并记录 Follower_MB 的端口。在上述示例中,
/dev/ttyACM1为 Follower_MB 的端口号,但实际环境中可能会不同,请留意。
在 Linux 系统中,可能因设备文件访问权限导致无法识别,必要时请执行以下命令授予权限。以下示例对 ttyACM0 设备修改权限,实际设备名可能因环境而异,请注意。
sudo chmod 666 /dev/ttyACM0
2.3. 将电机与电机总线关联
出厂时所有电机 ID 均设置为 1,为了与电机总线正确通信并关联,需要为每个电机分配唯一的 ID。
首先,为设置 Leader_MB,请执行以下命令:
lerobot-setup-motors \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 # Leader_MB 的端口
请在 --robot.port= 后填写在 电机总线设置 中确认的 Leader_MB 端口。如端口不是 /dev/ttyACM0,请相应修改后再执行。
当 PC 与 Leader_MB 通信建立后,会出现以下消息:
Connect the controller board to the '<关节名>' motor only and press enter.
此处显示的 <关节名> 表示即将分配 ID 的电机所负责的关节名称(例如:gripper)。操作步骤如下。
- 对照电机分类中准备的电机与该节表格,准备对应类型的电机(例如:gripper → 齿比 1/147 的电机)。
- 使用电机附带的数据线将该电机连接到电机总线。
- 在终端按下 Enter 键。
当 ID 分配成功后,会显示如下:
'<关节名>' motor id set to <ID>
请继续为其他 Leader 用电机以相同方式设置 ID。可通过下述官方视频查看整套操作流程。
完成 Leader_MB 设置后,请以同样方式设置 Follower_MB。如前所述,Follower 端电机通常为相同齿比,无需对照关节名称。但请注意不要混淆已设置的 ID。
官方仓库的视频中是在电机已经安装到臂上后设置 ID,但作者建议在安装前先设置 ID。Leader 端由多种齿比不同的电机构成,安装后难以区分,如装错位置则需拆解并重新设置 ID。
建议预先分配 ID,并使用标签(如标签贴)进行区分后再组装到机械臂,以大幅减少问题。
2.4. 机械臂组装
由于 SO-101 的组装步骤较多,请先参考官方教程视频或销售方的组装视频。
组装完成后,请务必按照各官方页面或教程中指导的校准步骤进行电机位置校准。校准不足会导致关节角度偏移,机器人以意外姿态运动,可能撞击周围物体或人员,存在危险。
关于组装,你只需观看上述任一视频即可,接下来针对伺服霍恩(参见下图)提供几点建议。
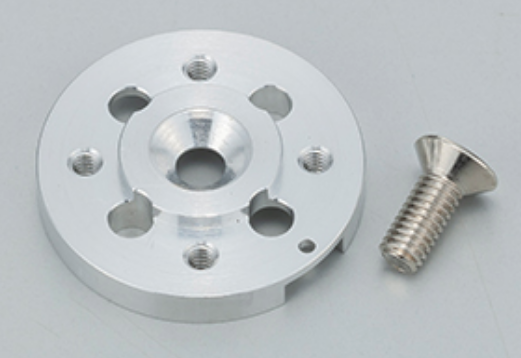
- 将机械臂的外壳及机构零件固定到伺服霍恩时使用大螺钉;将电机本体固定到机械臂时使用小螺钉。
- 安装伺服霍恩时,请将“凸部(突出部分)”朝向内侧(不朝外),平面朝外。若装反,螺钉无法完全拧紧,会影响机械臂的活动范围及平滑度。[2]
3. 运行确认
#参考链接:Imitation Learning on Real-World Robots
最后,使用 LeRobot 提供的模仿学习示例代码,通过 Leader 到 Follower 的远程操作进行运行确认。请确保电机总线已连接到电脑,然后执行以下命令:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \ # 请填写在电机总线设置中确认的 Follower_MB 端口
--robot.id=my_awesome_follower_arm \ # 请输入你喜欢的变量名
--teleop.type=so101_leader \
--teleop.port=/dev/ttyttyACM0 \ # 请填写在电机总线设置中确认的 Leader_MB 端口
--teleop.id=my_awesome_leader_arm # 请输入你喜欢的变量名
如果之前的步骤均正确执行,就会如介绍章节的 GIF 所示,当移动 Leader 时,Follower 会同步跟随动作。
最后
#本文作为使用 LeRobot 与 SO-101 的物理 AI 入门,介绍了环境搭建与基本运行确认步骤。今后如有机会,将深入探讨利用 LeRobot 进行学习(模仿学习、强化学习)以及机器人领域 AI 方法的细节。