使用ATtiny13A制作以纽扣电池供电的顶棚灯遥控器【开发篇】
Back to Top为了覆盖更广泛的受众,这篇文章已从日语翻译而来。
您可以在这里找到原始版本。
上一篇的文章请看【準備編】
到目前为止,前期准备终于完成。从这里开始进入正题,进行电路设计和程序开发。
自制红外遥控器的目标
#目标如下:
- 尽可能集成遥控器(HK9493)的功能
- 纽扣电池(3V)供电
- 省电
- 降低零件成本
遥控器操作按钮规格
#根据【準備編】中对红外线发送数据的解析得到,按钮对应的发送数据(命令)如下:
| 命令数组 | ch1 | ch2 | ch3 | 长按 |
|---|---|---|---|---|
| 暖色 | 0x9139522C(0xA8) | 0x9539522C(0xAC) | 0x9939522C(0xA0) | 〇 |
| 白色 | 0x9039522C(0xA9) | 0x9439522C(0xAD) | 0x9839522C(0xA1) | 〇 |
| 点亮 | 0x2D09522C(0x24) | 0x3509522C(0x3C) | 0x3D09522C(0x34) | |
| 熄灯 | 0x2F09522C(0x26) | 0x3709522C(0x3E) | 0x3F09522C(0x36) | |
| 明亮 | 0x2A09522C(0x23) | 0x3209522C(0x3B) | 0x3A09522C(0x33) | 〇 |
| 暗淡 | 0x2B09522C(0x22) | 0x3309522C(0x3A) | 0x3B09522C(0x32) | 〇 |
| 夜灯 | 0x2E09522C(0x27) | 0x3609522C(0x3F) | 0x3E09522C(0x37) | |
| 全灯 | 0x2C09522C(0x25) | 0x3409522C(0x3D) | 0x3C09522C(0x35) | |
| 晚安30分钟 | 0xA139522C(0x98) | 0xAA39522C(0x93) | 0xB339522C(0x8A) | |
| 频道确定 | 0xDA39522C(0xE3) | 0xDB39522C(0xE2) | 0xDC39522C(0xE5) |
(0xNN)是奇偶校验数据,长按表示该命令支持长按,通过持续按下按钮可实现调光。
共有3个频道,通过按对应的频道确定按钮,可以只接受该频道的命令。
电路图
#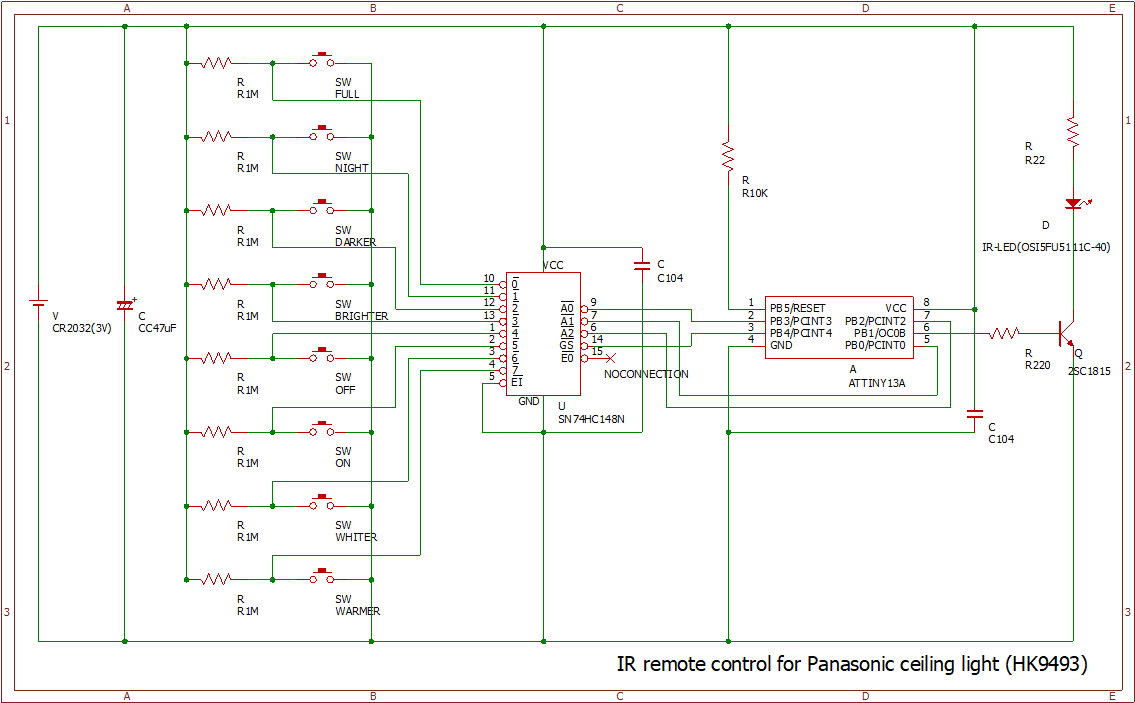
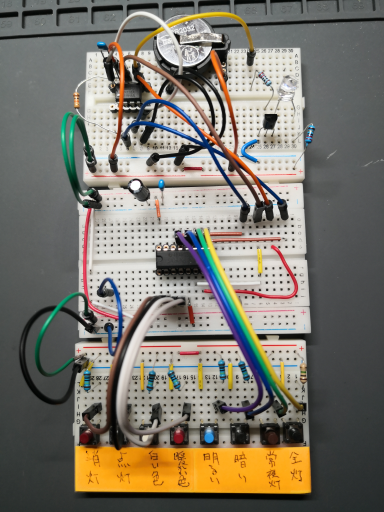
左侧有8个用于遥控控制的开关(SW),通过中央模块(编码器)连接到ATtiny13A。
虽然红外LED需要流过50mA到100mA的大电流,但由于ATtiny13A无法直接输出大电流,因此采用了晶体管驱动。
由于开关数量较多,且通过中央模块连接到ATtiny13A,所以布线较多。
开关的ON/OFF
#电路图左侧排列有8个开关,这些正是遥控器中用于点亮、熄灯等功能的按钮。
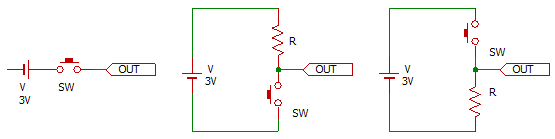
对于初学者(我也曾是其中的一员)来说,可能会对这种电路设计感到疑惑,因此我展示了类似的三种电路。你能看出当SW开/关时OUT电压的区别吗?
左侧
当SW打开时,电源电压3V施加于OUT,电流随之流动;当SW关闭时,OUT并非实际为0V,而是处于未连接的悬浮状态,状态不确定。这种情况称为“浮动状态”或“高阻抗”,是不允许出现的,必须确保输出固定为0V或保持在施加电压状态。
中间
当SW关闭时,电源电压3V施加于OUT,OUT上会流过依电源电压与电阻R决定的电流(V/R);当SW打开时,OUT变为0V。
如果没有电阻R,电源的正负极会直接短路,造成大电流和短路故障。
而加入电阻R后,由于电流不易流动,当电阻值较大(10K至数MΩ)时,几乎不流电,从而避免了短路。在这种情况下,电阻R的正极侧为3V,负极侧为0V,所以OUT保持在0V。
这种电阻称为上拉电阻,此电路称为上拉电路。
右侧
这是将中间电路中电阻R和SW的位置调换所得。
当SW关闭时,OUT连接到电源的负极,因此为0V。
当SW打开时,与先前相同,电阻R的正极侧为3V,负极侧为0V,因此OUT变为3V。
这种电阻称为下拉电阻,此电路称为下拉电路。
电路图中的所有按钮均为上拉电路。
引脚数量问题
#在ATtiny13A中,作为输入的引脚共有PB0到PB5共6个,但PB5兼作复位并在程序写入时使用,所以不予使用。
因此(除去1个RESET、4个GND和8个VCC)仅可使用5个引脚,其中1个用于红外发送时LED点亮的输出,故实际上只有4个输入引脚。
需要用4个引脚判断8个开关中哪个被按下[1],为此我考虑了以下几种方法。
A: 使用AD转换
将其中1根引脚设置为模拟输入模式,通过各开关接入不同阻值后测量电压值,并依据该电压判断按下了哪个开关。
B: 利用编码器
将8个输入线路接入编码器,通过3根或4根输出线路以二进制(3或4位数字)的形式进行判断。
C: 利用IO扩展器
将8个输入线路接入IO扩展器,ATtiny13A通过I2C(2根线)与IO扩展器通信,从而判断按下了哪个开关。
尝试方法A后发现,由于AD转换为8位,可将最大3V的输入电压转换为0到255的值,但由于开关有8个,需要利用不同阻值产生8个电压区间。设定各个阈值区间既繁琐又精度不足,容易误判,因此放弃此法。
方法B可利用SN74HC148N编码器电路实现,并且所需接入ATtiny13A的引脚数也正合适。
方法C由于需要编写I2C通信程序,既脱离主题又会占用较大程序空间,因此判断不切实际。
所以,最终采用了方法B。
IO扩展器正如其名,是用于扩展(增加)输入输出引脚数量的电路。
I2C (Inter Integrated Circuit) 是一种只需2根线(数据线和时钟线)即可与多个模块通信的协议。通常用于与液晶显示器、简单传感器等设备通信。发音为“爱斯克威尔德西”或“爱二西”。
查看SN74HC148N的数据手册(规格书)[2],输入与输出的对应关系如下表所示。
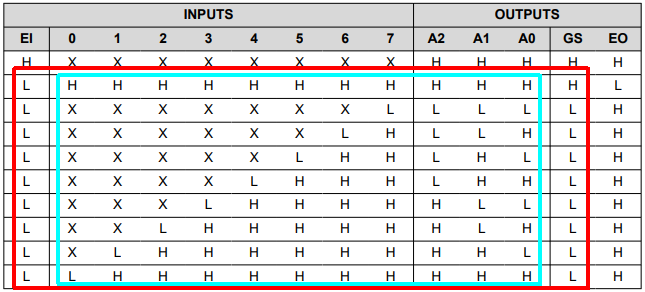
从浅蓝色框中,通过观察INPUTS 0到7的高/低电平和OUTPUTS A0到A2的高/低电平,可以判断出哪个开关被按下[3]。
但是,当仅INPUTS的0为低电平(最后一行)和所有INPUTS均为高(第二行)时,OUTPUTS A0到A2均为相同的高电平状态。这样,无论是对应INPUTS的0的开关被按下,还是没有任何开关按下,OUTPUTS都相同,无法判断。
因此,如红色框所示,作为INPUTS额外加入了EI(但始终为低电平),使得输入线路总数达到9根,同时在OUTPUTS中添加GS,使输出线路增加到4根。
这样,输出便以4位二进制表示出9种不同的模式。
当OUTPUTS的EO为低电平时,表示没有任何开关被按下,从而也可以据此判断,不过无论如何,输出仍然需要4根线路。
另外,输入引脚在无输入时必须保持为高电平(即低有效),因此需要预先上拉(前述: 开关的ON/OFF)。
可能会有人质疑:“那干脆用一个一开始就带有8个引脚可用的单片机不就好了?”但我想做点用ATtiny13A制作的东西,所以请理解为“这也是可以实现的”😅。
旁路电容
#电容(C)即使不装也可能能工作,但具有以下作用:
- 缓和电压变化(降噪)
- 在电流突增时提供电力
在电源(V)与地(GND)之间并联电容,可以旁通过滤噪声,因此称为旁路电容(简称为パスコン)。
程序在稳态下几乎不耗电(低于0.1uA)(后述),但一旦按下遥控器按钮,红外LED便会点亮。红外虽然肉眼不可见,但会像普通LED一样发光。
由于用于遥控器,需要发出比普通LED更强的光以保证信号能传达到几米之外的红外接收器,因此需要流过约50到100mA的电流[4]。这就会导致电流骤增、电压下降。
在电池供电的情况下,最初使用新电池时无碍,但随着电量消耗,电压会逐渐降低。当电压降至接近单片机最低工作电压(ATtiny13A为1.8V)时,单片机可能会运行不稳定。但加装旁路电容可提供缓冲,使得电池能更长久(更高效)地使用。
程序
#程序总行数约为280行。
- 头文件include、define定义、数据数组定义约90行
- setup()约90行
- loop()约70行
控制逻辑(setup(), loop(), 以及其他函数)超过100行,但每段处理均有注释说明,并用大括号分块,寄存器设置中的位运算也逐位换行,因此尽管代码行数较多,但其内容十分简单。
#include <avr/io.h>
#include <util/delay.h>
#include <util/delay_basic.h>
#include <avr/interrupt.h>
#include <avr/sleep.h>
#include <wiring_private.h>
#include <avr/pgmspace.h>
#include <avr/eeprom.h>
#define IR_COMMAND_WARMER 0 // 暖色
#define IR_COMMAND_WHITER 1 // 白色
#define IR_COMMAND_ON 2 // 点亮
#define IR_COMMAND_OFF 3 // 熄灯
#define IR_COMMAND_BRIGHTER 4 // 明亮
#define IR_COMMAND_DARKER 5 // 暗淡
#define IR_COMMAND_NIGHT 6 // 夜灯
#define IR_COMMAND_FULL 7 // 全灯
#define IR_COMMAND_NONE 15 // 无
#define HEADERMARK 1035 // 8T(3450微秒)
#define HEADERSPACE 510 // 4T(1700微秒)
#define DATAMARK 135 // 1T(450微秒)
#define ONESPACE 390 // 3T(1300微秒)
#define ZEROSPACE 135 // 1T(450微秒)
#define COMMAND_SIZE 5
// 照明控制
const byte command_1ch_0[] PROGMEM = {0x91, 0x39, 0x52, 0x2C, 1};
const byte command_1ch_1[] PROGMEM = {0x90, 0x39, 0x52, 0x2C, 1};
const byte command_1ch_2[] PROGMEM = {0x2D, 0x09, 0x52, 0x2C, 0};
const byte command_1ch_3[] PROGMEM = {0x2F, 0x09, 0x52, 0x2C, 0};
const byte command_1ch_4[] PROGMEM = {0x2A, 0x09, 0x52, 0x2C, 1};
const byte command_1ch_5[] PROGMEM = {0x2B, 0x09, 0x52, 0x2C, 1};
const byte command_1ch_6[] PROGMEM = {0x2E, 0x09, 0x52, 0x2C, 0};
const byte command_1ch_7[] PROGMEM = {0x2C, 0x09, 0x52, 0x2C, 0};
const byte command_2ch_0[] PROGMEM = {0x95, 0x39, 0x52, 0x2C, 1};
const byte command_2ch_1[] PROGMEM = {0x94, 0x39, 0x52, 0x2C, 1};
const byte command_2ch_2[] PROGMEM = {0x35, 0x09, 0x52, 0x2C, 0};
const byte command_2ch_3[] PROGMEM = {0x37, 0x09, 0x52, 0x2C, 0};
const byte command_2ch_4[] PROGMEM = {0x32, 0x09, 0x52, 0x2C, 1};
const byte command_2ch_5[] PROGMEM = {0x33, 0x09, 0x52, 0x2C, 1};
const byte command_2ch_6[] PROGMEM = {0x36, 0x09, 0x52, 0x2C, 0};
const byte command_2ch_7[] PROGMEM = {0x34, 0x09, 0x52, 0x2C, 0};
const byte command_3ch_0[] PROGMEM = {0x99, 0x39, 0x52, 0x2C, 1};
const byte command_3ch_1[] PROGMEM = {0x98, 0x39, 0x52, 0x2C, 1};
const byte command_3ch_2[] PROGMEM = {0x3D, 0x09, 0x52, 0x2C, 0};
const byte command_3ch_3[] PROGMEM = {0x3F, 0x09, 0x52, 0x2C, 0};
const byte command_3ch_4[] PROGMEM = {0x3A, 0x09, 0x52, 0x2C, 1};
const byte command_3ch_5[] PROGMEM = {0x3B, 0x09, 0x52, 0x2C, 1};
const byte command_3ch_6[] PROGMEM = {0x3E, 0x09, 0x52, 0x2C, 0};
const byte command_3ch_7[] PROGMEM = {0x3C, 0x09, 0x52, 0x2C, 0};
// 频道确定
const byte command_channel_1[] PROGMEM = {0xDA, 0x39, 0x52, 0x2C, 0};
const byte command_channel_2[] PROGMEM = {0xDB, 0x39, 0x52, 0x2C, 0};
const byte command_channel_3[] PROGMEM = {0xDC, 0x39, 0x52, 0x2C, 0};
// 晚安30分钟
const byte command_sleep30_1[] PROGMEM = {0xA1, 0x39, 0x52, 0x2C, 0};
const byte command_sleep30_2[] PROGMEM = {0xAA, 0x39, 0x52, 0x2C, 0};
const byte command_sleep30_3[] PROGMEM = {0xB3, 0x39, 0x52, 0x2C, 0};
// 红外线发送数据列表
const byte * const commands[] PROGMEM = {
command_1ch_0,
command_1ch_1,
command_1ch_2,
command_1ch_3,
command_1ch_4,
command_1ch_5,
command_1ch_6,
command_1ch_7,
command_2ch_0,
command_2ch_1,
command_2ch_2,
command_2ch_3,
command_2ch_4,
command_2ch_5,
command_2ch_6,
command_2ch_7,
command_3ch_0,
command_3ch_1,
command_3ch_2,
command_3ch_3,
command_3ch_4,
command_3ch_5,
command_3ch_6,
command_3ch_7,
command_channel_1,
command_channel_2,
command_channel_3,
command_sleep30_1,
command_sleep30_2,
command_sleep30_3,
};
// 用于频道切换的偏移量
byte command_offset = 0;
void setup() {
// 端口设置
{
sbi(DDRB, DDB1);
sbi(PORTB, PORTB0);
sbi(PORTB, PORTB2);
sbi(PORTB, PORTB3);
sbi(PORTB, PORTB4);
}
// 定时器设置
{
TCCR0A =
(0 << COM0A1)
| (0 << COM0A0)
| (0 << COM0B1)
| (0 << COM0B0)
| (1 << WGM01)
| (1 << WGM00)
;
TCCR0B =
(0 << FOC0A)
| (0 << FOC0B)
| (1 << WGM02)
| (0 << CS02)
| (0 << CS01)
| (1 << CS00)
;
OCR0A = 31;
OCR0B = 11;
TIMSK0 = 0;
}
// 省电设置
{
sbi(PRR, PRADC);
}
// 频道设置的读写及频道设置的发送
{
uint8_t eeprom_address = 0x00;
uint8_t read_data = eeprom_read_byte(&eeprom_address);
if (read_data == 0 || read_data == 8 || read_data == 16) {
command_offset = read_data;
} else {
command_offset = 0;
eeprom_update_byte(&eeprom_address, command_offset);
}
_delay_ms(20);
byte command_no = get_command_no();
if (command_no == IR_COMMAND_ON) {
read_data = 0;
command_no = 0;
} else if (command_no == IR_COMMAND_FULL) {
read_data = 8;
command_no = 1;
} else if (command_no == IR_COMMAND_NIGHT) {
read_data = 16;
command_no = 2;
} else {
read_data = command_offset;
}
if (read_data != command_offset) {
command_offset = read_data;
eeprom_update_byte(&eeprom_address, command_offset);
byte buffer[COMMAND_SIZE] = {0};
command_offset = 24;
get_command_data(command_no, buffer);
ir_send(buffer);
command_offset = read_data;
}
}
// 中断设置与睡眠设置
cli();
{
sbi(GIMSK, PCIE);
sbi(PCMSK, PCINT0);
sbi(PCMSK, PCINT2);
sbi(PCMSK, PCINT3);
sbi(PCMSK, PCINT4);
set_sleep_mode(SLEEP_MODE_PWR_DOWN);
}
sei();
}
void loop() {
sleep_mode();
_delay_ms(20);
byte command_no;
byte buffer[COMMAND_SIZE] = {0};
byte *longPress = &buffer[4];
do {
if (*longPress) {
_delay_ms(100);
}
command_no = get_command_no();
if (command_no == IR_COMMAND_NONE) {
return;
}
get_command_data(command_no, buffer);
ir_send(buffer);
} while (*longPress);
}
// 获取命令号
byte get_command_no() {
return
((bit_is_set(PINB, PINB4) ? 1 : 0) << 3)
| ((bit_is_set(PINB, PINB2) ? 1 : 0) << 2)
| ((bit_is_set(PINB, PINB0) ? 1 : 0) << 1)
| ((bit_is_set(PINB, PINB3) ? 1 : 0) << 0)
;
}
// 获取指定命令号的红外线发送数据
void get_command_data(byte command_no, byte *out) {
memcpy_P(out, (byte *)pgm_read_byte(
&commands[command_offset + command_no]), COMMAND_SIZE);
}
// 红外线发送
void ir_send(byte *command) {
// 生成数据部分
uint32_t data =
((uint32_t)command[0] << 24)
| ((uint32_t)command[1] << 16)
| ((uint32_t)command[2] << 8)
| ((uint32_t)command[3] << 0)
;
// 奇偶校验计算
byte parity = command[0] ^ command[1];
// 发送引导部分
sbi(TCCR0A, COM0B1);
_delay_loop_2(HEADERMARK);
cbi(TCCR0A, COM0B1);
_delay_loop_2(HEADERSPACE);
// 发送数据部分
for (uint8_t i = 0; i < 32; i++) {
sbi(TCCR0A, COM0B1);
_delay_loop_2(DATAMARK);
cbi(TCCR0A, COM0B1);
_delay_loop_2((data>>i) & 1 ? ONESPACE : ZEROSPACE);
}
// 发送奇偶校验
for (uint8_t i = 0; i < 8; i++) {
sbi(TCCR0A, COM0B1);
_delay_loop_2(DATAMARK);
cbi(TCCR0A, COM0B1);
_delay_loop_2((parity>>i) & 1 ? ONESPACE : ZEROSPACE);
}
// 发送尾部
sbi(TCCR0A, COM0B1);
_delay_loop_2(DATAMARK);
cbi(TCCR0A, COM0B1);
_delay_loop_2(ZEROSPACE);
}
编译(保险丝)设置
#为了实现省电,修改了以下设置:
- 禁用BOD (Brown Out Detection)
- 将时钟频率改为1.2MHz
禁用BOD
电源电压为3V,但当电压低于单片机的工作电压(ATtiny13A为1.8V)时,可能会引起误操作。BOD是一种检测电压下降并向单片机施加复位使其停止工作的机制。
可能在单片机发生误操作前,就因电压不足(LED点亮所需的正向电压不足)而无法进行红外发送。而且禁用BOD后功耗大幅降低,对省电贡献显著。
更改时钟频率
基本上,AVR单片机的时钟频率越低,其能在更低电压下运行。
另外,虽然默认的时钟频率为9.6MHz,但由于红外发送仅需要38KHz调制以及约450微秒延时(等待处理)的精度,所以不需要高频。
定时器依赖于时钟频率,因此在生成38KHz调制信号及计算延时时需做相应计算,但为了简化处理,便采用了网络上常用的1.2MHz。
数据声明
#在包含头文件与常量定义后,各个命令数据以数组形式定义。
用于控制照明的命令,每个命令为4字节(不含奇偶校验),共30个命令,因此数据总计为120字节。
如前所述,SRAM仅有64字节,完全不足,因此必须加以巧妙处理。
const byte command_1ch_0[] PROGMEM = {0x91, 0x39, 0x52, 0x2C, 1};
数组最后一个元素若为1则表示该命令支持长按,否则为0,以此判断是否为长按命令。
PROGMEM 是Arduino草图中的特殊关键字,用于将数据存储在Flash内存(程序存储区)而非SRAM中。由此可以定义超出SRAM容量的数据。虽然这增加了程序体积,但仍能勉强控制在Flash内存容量以内。
编译时日志
最大1024字节的Flash内存中,草图使用了972字节(94%)。
最大64字节的RAM中,全局变量占用1字节(1%),局部变量可用63字节。
setup() 处理
#这里进行寄存器设置。由于需要参考数据手册了解各寄存器的配置,仅凭代码可能难以完全理解,所以这里只作简要说明。
使用sbi(寄存器, 位)将指定寄存器的指定位置为1;使用cbi(寄存器, 位)则将其置为0。
端口设置
- 由于红外LED连接在PB1(pin6)上,因此将该端口设为输出模式。
- 连接到编码器的8个按钮在关闭时输出为HIGH(低有效),故将PB0、PB2、PB3、PB4的输出均设为HIGH。
定时器设置
用于生成38KHz调制信号(38KHz交替ON/OFF的信号)的设置:
- 将波形生成模式设为高速PWM
- OCR0A = 31,由公式 ((1.2MHz / 38KHz) / 1(分频)) - 1 = 30.6 计算得出
- OCR0B = 11,使占空比为1/3,由 (1.2MHz / 38KHz) / 3 = 10.5 得出
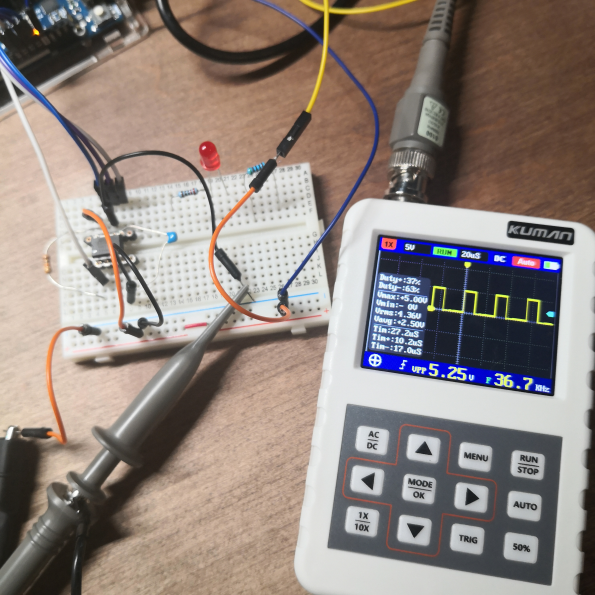
38KHz调制波形的生成由单片机定时器完成,因此在程序(loop函数中)只需指定PB1(pin6)的输出状态,控制非常简洁。
下面的图片为使用简易示波器实际测得的波形。虽然测得的矩形波为36.7KHz而非38KHz,但在这种误差范围内红外发送完全没有问题。
省电设置
这里设置了降低A/D转换器功耗的选项,但似乎仅在Active状态或使用set_sleep_mode(SLEEP_MODE_IDLE)时有效,因此可能并非必需。本程序指定的睡眠模式为set_sleep_mode(SLEEP_MODE_PWR_DOWN)。
红外线发送频道设置的读写
遥控器具有频道切换(3档)和确定按钮。原本计划只在初次设置后便不再使用,因此一开始打算不实现此功能。但因程序区域有余,遂实现了该功能。不过,由于ATtiny13A的所有端口均已占用,故无可用引脚。经过反复斟酌,决定在通电(安装纽扣电池)且调用setup函数时,根据当时按下的按钮类型来进行频道设置。
| 按钮 | 频道设置 |
|---|---|
| 未按下时 | 保存的频道 |
| 点亮按钮 | 1ch |
| 夜灯按钮 | 2ch |
| 全灯按钮 | 3ch |
频道设置写入EEPROM中,因此即使更换纽扣电池,也能恢复先前设定的频道。
中断设置与睡眠设置
- 将中断类型设置为当引脚状态发生变化时触发中断
- 对编码器的输出(PB0, PB2, PB3, PB4)启用引脚变化中断
- 将睡眠模式设定为SLEEP_MODE_PWR_DOWN
睡眠模式共有SLEEP_MODE_IDLE、SLEEP_MODE_ADC、SLEEP_MODE_PWR_DOWN三种,其工作方式如下图所示:
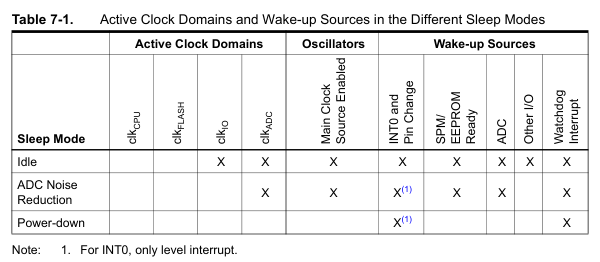
设定为SLEEP_MODE_PWR_DOWN时,所有时钟停止,发射电路亦停止,单片机进入深度睡眠状态,除监测中断外一切活动均停止。因而功耗降至0.1uA以下,几乎不再消耗电力。
唤醒方式仅有以下几种:
- INT0外部中断或引脚变化中断
- 看门狗定时器中断
loop() 处理
#循环处理
这是程序的主循环。
- 通过sleep_mode()函数进入睡眠状态,直到按钮被按下程序才会唤醒
- 当按钮按下并通过引脚变化中断唤醒后,为防止抖动延时20毫秒
- 确定被按下的按钮,获取对应命令数据并执行红外发送(使红外LED闪烁)
- 若按下的按钮为支持长按的按钮,则每隔100毫秒重复相同处理
- 退出loop()函数后会立即重新调用loop(),回到第1步
抖动是指按钮或开关在开启/关闭时因机械振动而产生短暂的多次开闭现象。如果利用引脚变化中断触发中断,则一次按下可能会引发多次中断。
获取命令号
将编码器的输出(PB0, PB2, PB3, PB4)通过位移运算转换为4位数字并返回,该数字即为命令号。
获取指定命令号的红外线发送数据
在数据声明时,命令数据存储在Flash内存中,此处从Flash内存中获取。
红外线发送
- 从命令数据数组生成发送数据
通过位移运算生成32位数据 - 奇偶校验计算
奇偶校验通过对数据代码执行异或(xor)data[0] ^ data[1]计算 - 发送引导部分
先发送ON状态8T,再转为OFF并等待4T - 发送数据部分
对命令数据右移,检查最低位以决定发送时的空闲等待时间 - 发送奇偶校验
对奇偶校验数据,同样执行与引导部分相同的处理 - 发送尾部
理论上OFF状态至少需8ms,但下述设置亦可正常工作
根据IRremote库测量结果,T=450微秒。为测量此时间,使用ATTiny13A中定义于util/delay_basic.h的_delay_loop_2(loop_count)函数。
根据数据手册,_delay_loop_2(1)消耗4个CPU周期。当CPU频率(F_CPU)为1.2MHz时,则1,200,000[Hz] / 4[周期] = 300,000,即300,000次循环约等于1秒。
由于参数为16位计数器(最大可达65536),故当传入30000时,_delay_loop_2(30000)约等于延时100毫秒。
由此,若要延时1T=450微秒,则应使用_delay_loop_2(135)。求出8T、4T、3T时,loop_count的值如下:
#define headerMark 1035 // 8T(3450微秒):3450*30000/100000 = 345*3 = 1035
#define headerSpace 510 // 4T(1700微秒):1700*30000/100000 = 170*3 = 510
#define dataMark 135 // 1T(450微秒) : 450*30000/100000 45*3 = 135
#define oneSpace 390 // 3T(1300微秒):1300*30000/100000 = 130*3 = 390
#define zeroSpace 135 // 1T(450微秒) : 450*30000/100000 = 45*3 = 135
总结
#经过反复试验,实现了目标所要求的充分利用单片机功能、省电且低成本的设计,并使得loop()函数编写得异常简洁。唯一遗憾的是“晚安30分钟”命令尚未能调用,计划在未来的机会中挑战此功能。
下一篇将是【基板・ケース作成編】。
未考虑多个开关同时按下的情况 ↩︎
SN74HC148N的数据手册。在秋月电子售价仅30日元,非常便宜 ↩︎
X的值与判断无关 ↩︎
实际上,由于红外信号以38KHz脉冲形式反复ON/OFF,因此并非持续点亮,而是以高速闪烁。 ↩︎