OpenCVで使用できるキャリブレーション用パターンの紹介
Back to Topはじめに
#今回は画像処理ライブラリOpenCVで使用できるカメラキャリブレーション用の平面パターンについて紹介します。
OpenCVでカメラを活用するためには、キャリブレーションという作業が必要になることがあります。
カメラのキャリブレーションによってレンズによる画像の歪みを補正したり、ロボットとカメラの位置関係を計測したり、ステレオカメラを構築したりできますが、キャリブレーションを行うためには専用のマーカーが印刷された平面パターンが必要です。
OpenCVには標準で検出機能が備わっているキャリブレーションパターンがいくつかありますので、それらを特色とともに紹介します。
カメラのキャリブレーションについて
#カメラのキャリブレーションでは、通常以下の3つの要素を計測します。
- 内部パラメータ:カメラの光学的中心と焦点距離
- 外部パラメータ:カメラの位置姿勢
- レンズの歪曲収差:レンズの歪み
各要素についての詳細な説明はWeb上にたくさん情報がありますので今回は省略させていただきます。
各要素の代表的な用途として、レンズによる画像の歪みを補正したい場合は内部パラメータおよびレンズ歪曲収差が必要になります。
カメラで検出したカメラ座標系基準のワーク姿勢をロボット座標系基準に変換したい場合は、外部パラメータが必要になります。
また測定したい要素によって、使用するキャリブレーションパターンの要素が異なります。
内部パラメータやレンズの歪曲収差の計測には、キャリブレーションパターンの格子点が使用されます。

一方、外部パラメータの計測には、主にキャリブレーションパターンの姿勢が使用されます。
計測したい内容によって、適切なキャリブレーションパターンを選択する必要があります。
パターンの種類
#OpenCVで使用できる代表的なパターンは以下の4つです。
- CheckerBoard
- CircleGrid
- AsymmetryCircleGrid
- ChArUco
いずれのパターンもcalib.ioにて自在なサイズで生成することが出来ます。
CheckerBoard
#格子模様のキャリブレーションパターンです。
ChessBoardとも呼ばれます。
パターン仕様
- Rows: 7
- Columns: 7
- Checker Width[mm]: 28
最も基本的で有名なキャリブレーションパターンです。
内側の格子点がキャリブレーションに使用されます。
パターンの検出結果は以下の通りです。
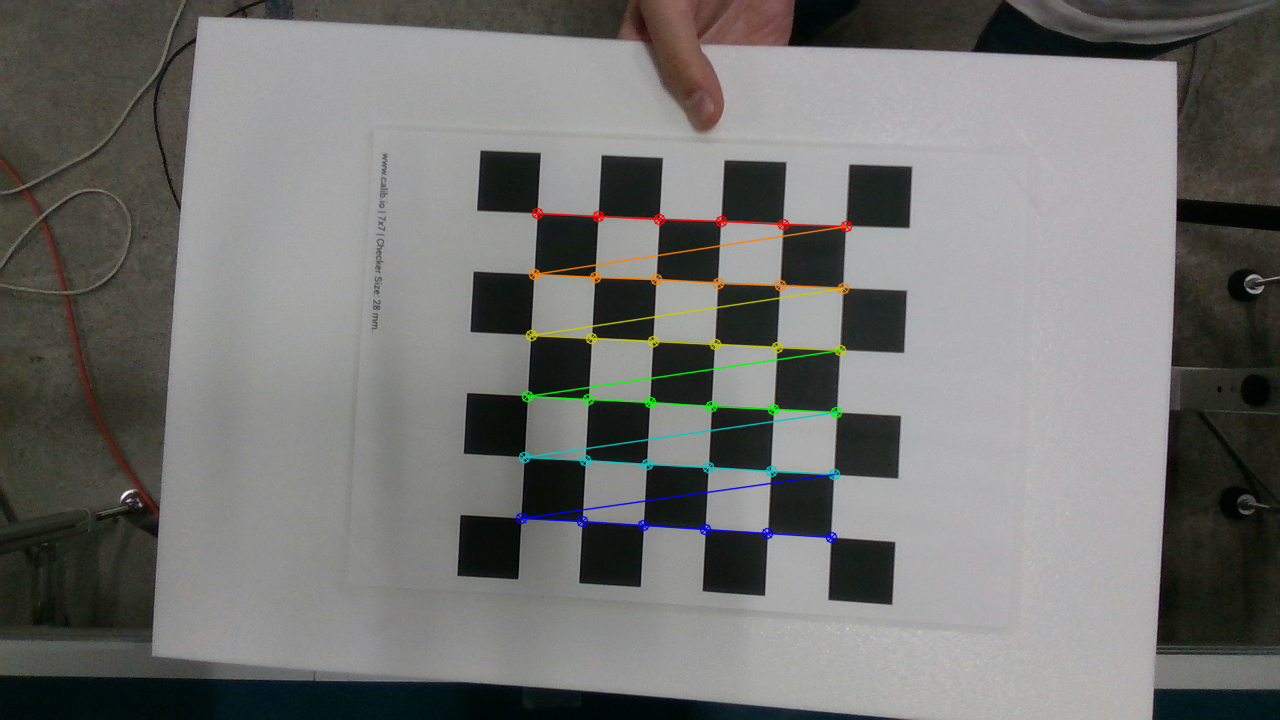
OpenCVでは検出できた格子点をこのように色付けして描画できるので、視覚的にもわかりやすいです。
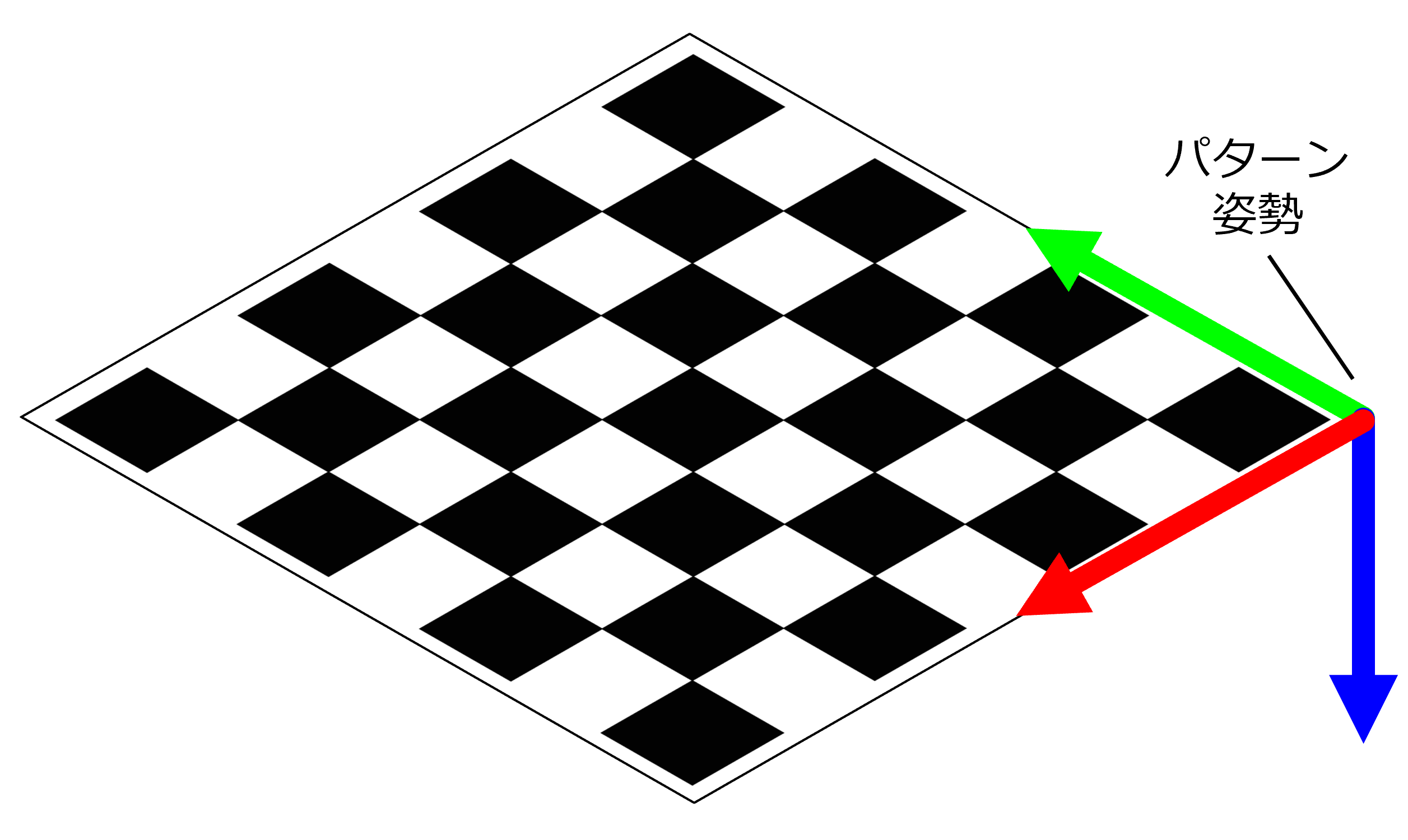
パターンをカメラの光軸周りに回転させると、以下のようにパターン座標軸の原点や向きが一意に定まりません。
従ってパターン姿勢が一意に定まらないため、外部パラメータの計測には使用できません。
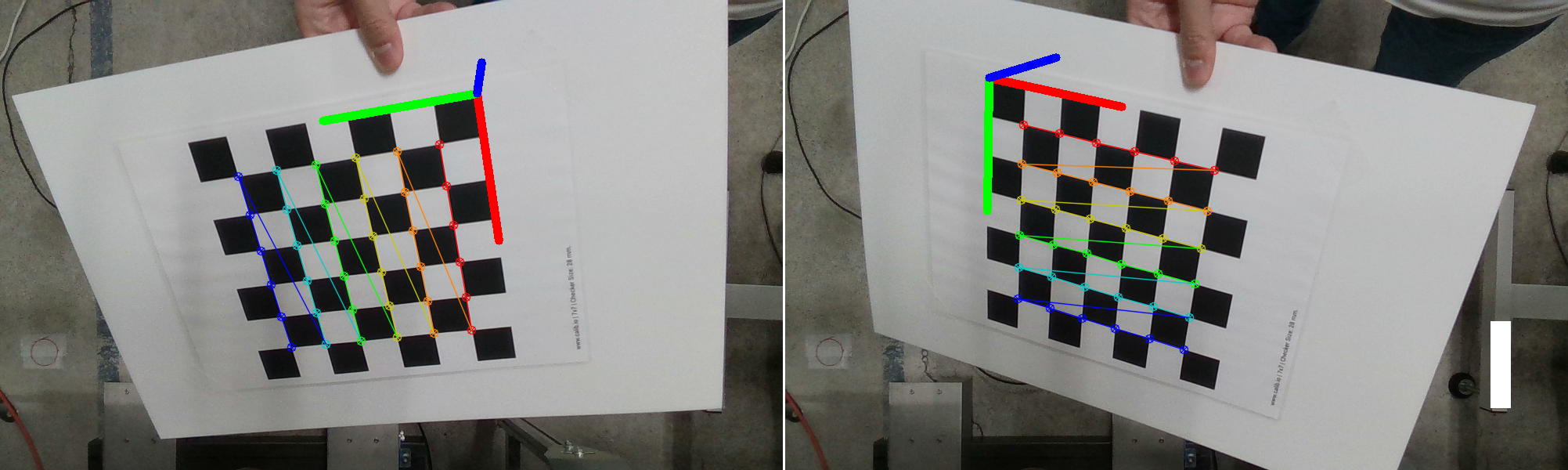
X軸を赤、Y軸を緑、Z軸を青として座標軸を描画しています。
CircleGrid
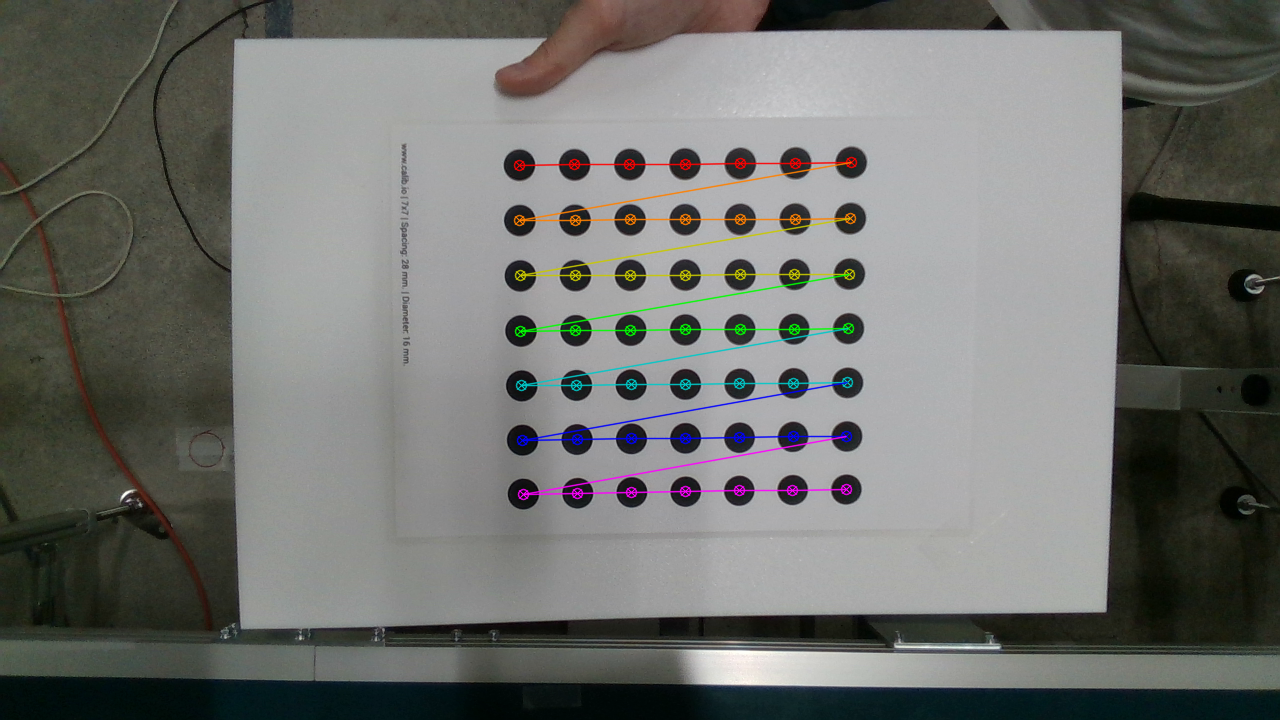
#ドットマーカーが格子状に並んだキャリブレーションパターンです。

パターン仕様
- Rows: 7
- Columns: 7
- Circle Spacing[mm]: 28
- Diameter[mm]: 16
各ドットの重心点が格子点としてキャリブレーションに使用されます。
パターンの検出結果は以下の通りです。
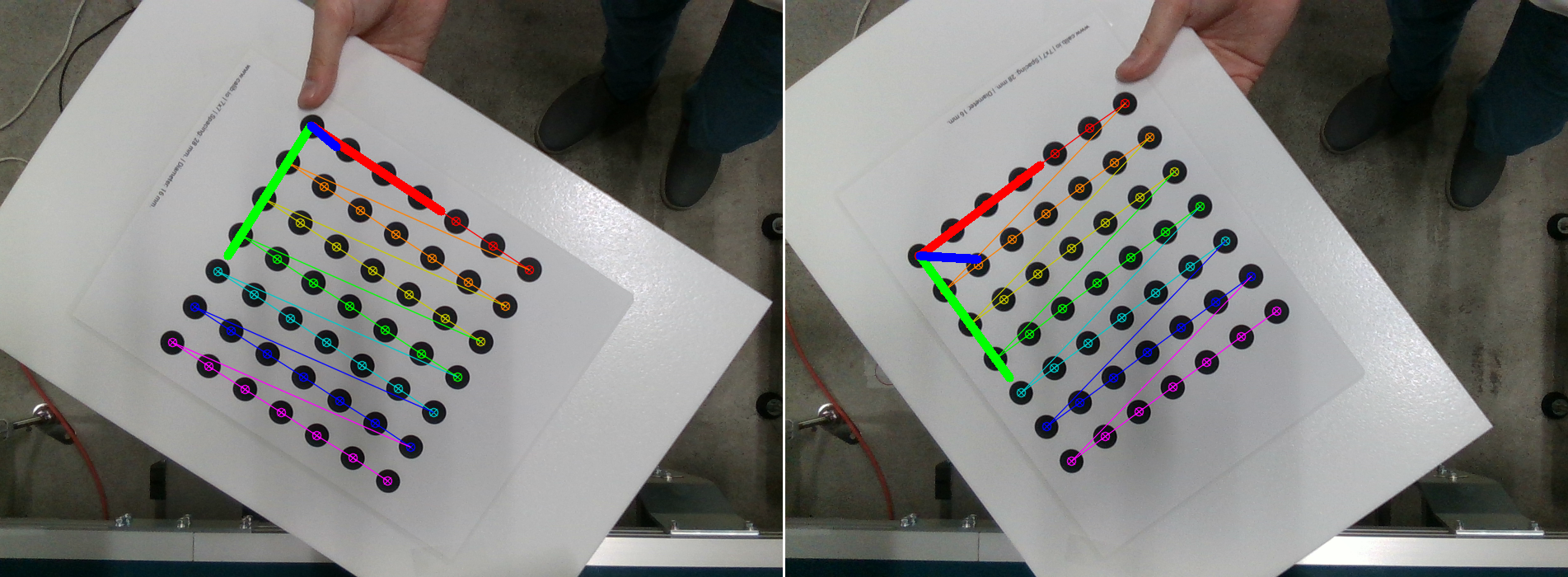
パターンがカメラに対して傾いた場合、サークルドットの形状が楕円になるだけで各ドットの重心点の位置はほとんど変化しません。
なのでChessBoardと比較してCircleGridの方が精度の良い検出ができると言われています。
こちらもパターンをカメラの光軸周りに回転させるとパターン姿勢が一意に定まらないので、外部パラメータの計測には使用できません。
Asymmetry-CircleGrid
#ドットマーカーが斜め格子状に並んだキャリブレーションパターンです。

パターン仕様
- Rows: 4
- Columns: 9
- Circle Spacing[mm]: 28
- Diameter[mm]: 16
CircleGridとの違いは、パターンが非対称なのでパターン姿勢が一意に定まる点です。
なので内部パラメータ、外部パラメータ、レンズの歪曲収差、全ての計測に使用できます。
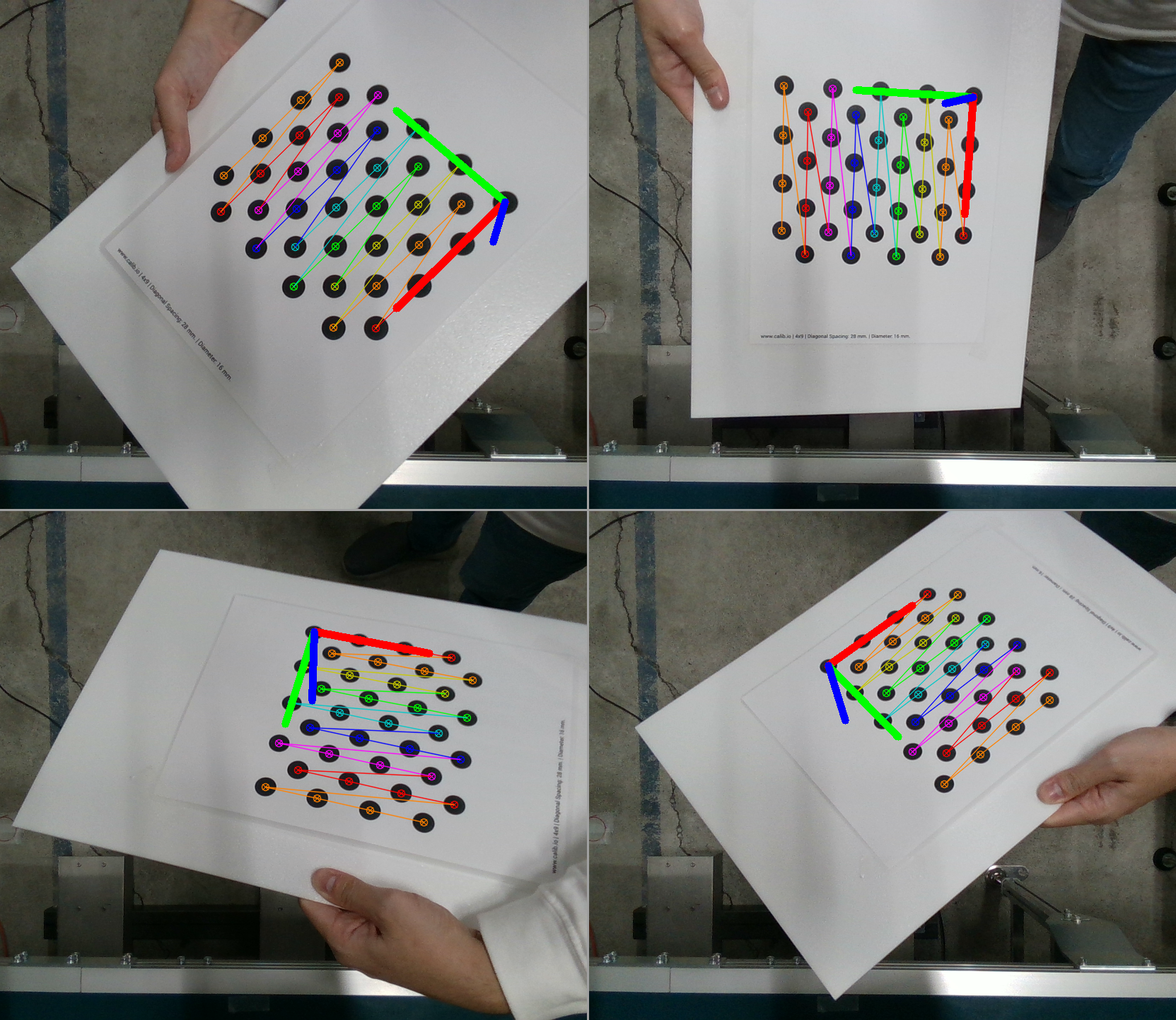
上記例は列数が9と奇数ですが、以下のように列数を偶数にしてしまうと点対称になりパターン姿勢が一意に定まらないので注意が必要です。

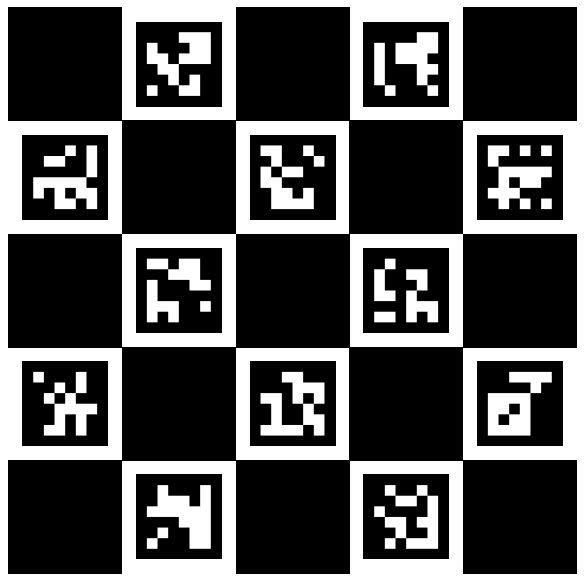
ChArUco
#CheckerBoardとArUcoマーカーを組み合わせたキャリブレーションパターンです。
パターン仕様
- Rows: 5
- Columns: 5
- Checker Width[mm]: 40
- Dictionary: DICT_6X6
CheckerBoardとしての使用も可能ですが、最大の特徴は散りばめられたArUcoマーカーにあります。
通常のCheckerBoardではパターン姿勢が一意に定まりませんが、ChArUcoではArUcoマーカーにより一意に定まります。
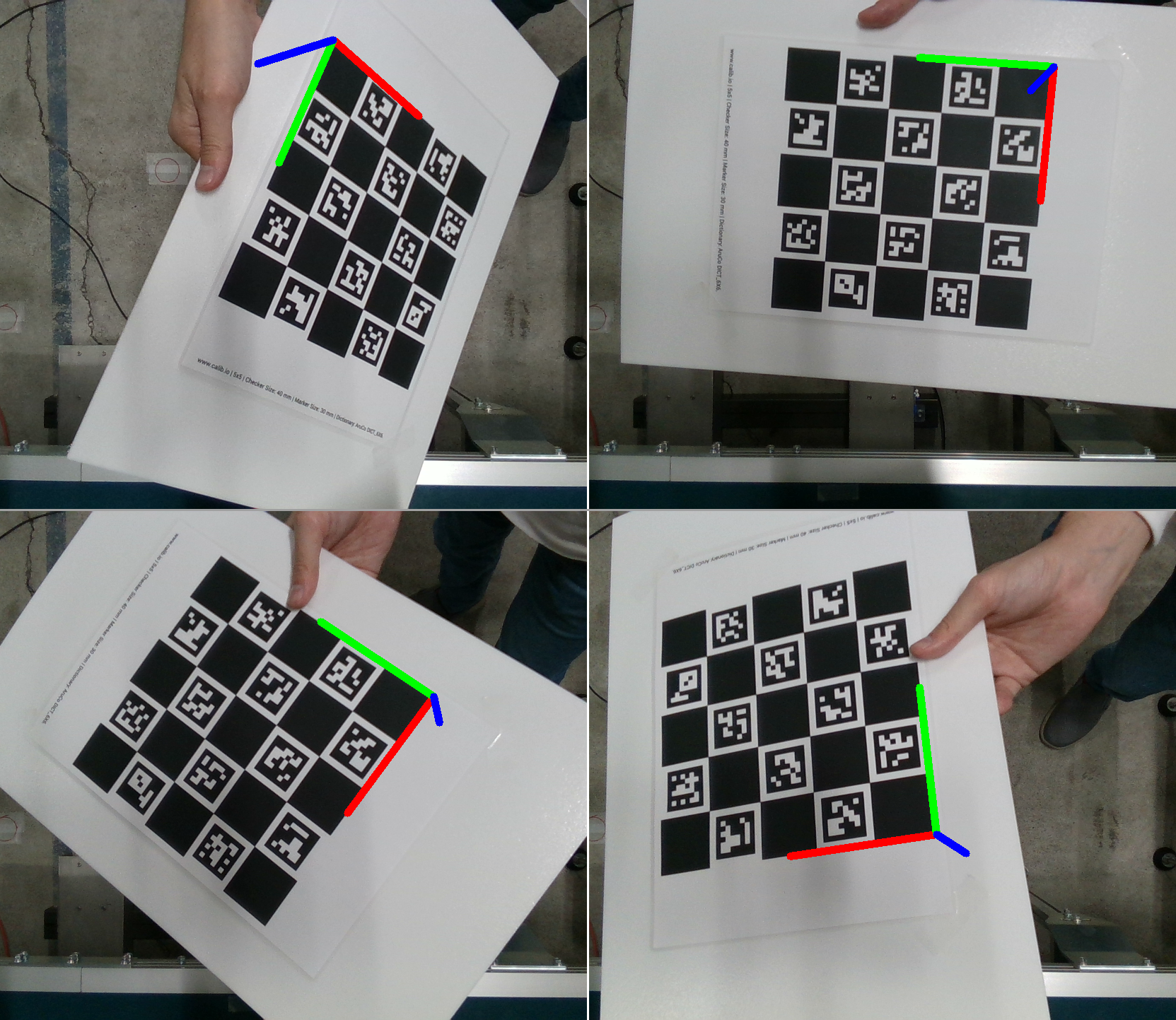
こちらも内部パラメータ、外部パラメータ、レンズの歪曲収差、全ての計測に使用できます。
ただしArUcoマーカーがある関係上、グリッド一辺の長さがそこそこ大きくなってしまうため通常のCheckerBoardと比較して格子点が少ないです。
なので精度の良い内部パラメータ測定のためにはデータ数を多く取る必要があるので注意しましょう。
またキャリブレーションパターンの一部が隠れていても、検出されたArUcoマーカーにより隠れを補間しての姿勢推定が可能です。
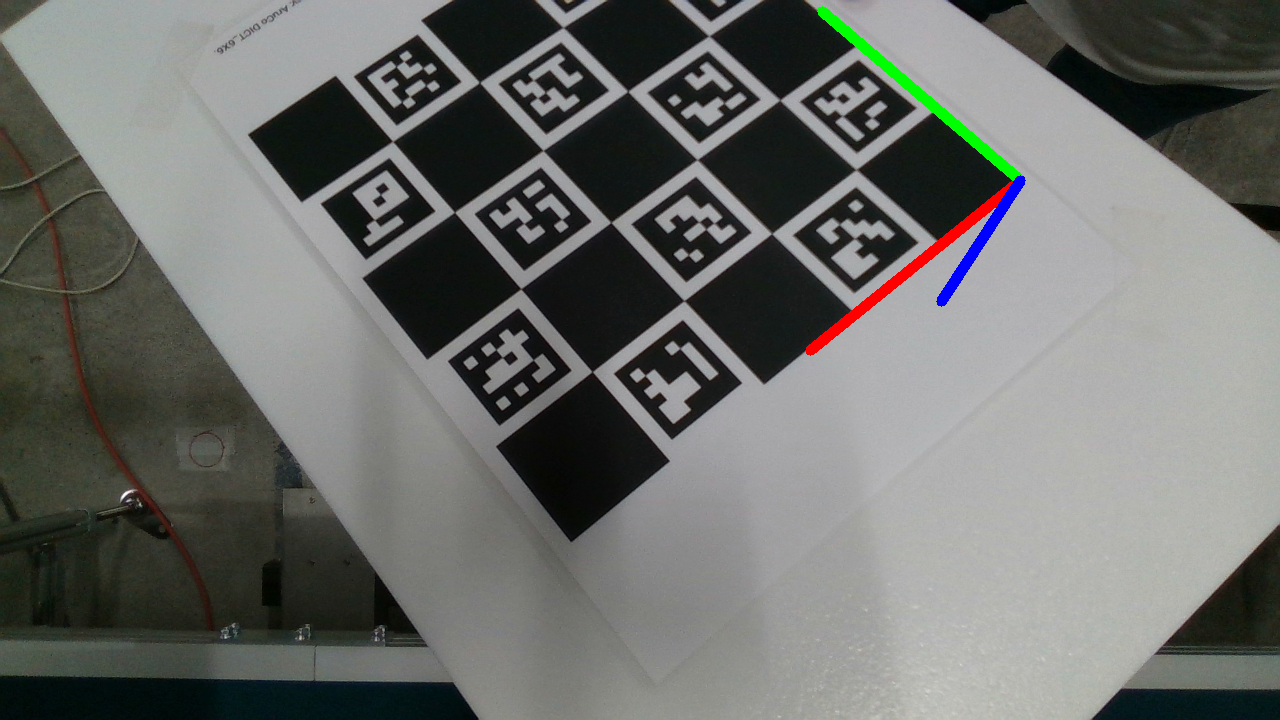
カメラとロボットの外部パラメータを計測するときには、ロボットアームの先端にキャリブレーションパターンを取り付けてカメラで撮影する手法を取ることがあります。
その時、ロボットアーム自体がカメラの視界の妨げとなりキャリブレーションパターンの一部が隠れてしまうことがあるのですが、ChArUcoを用いればそのような場合でも問題なくキャリブレーションできるので重宝しています。
各パターン機能のまとめ
#各パターンにおける計測が出来る要素についてまとめました。
| パターン | 内部パラメータ・レンズの歪曲収差 | 外部パラメータ |
|---|---|---|
| CheckerBoard | ◯ | × |
| CircleGrid | ◎ | × |
| Asymmetry-CircleGrid | ◎ | ◯ |
| ChArUco | ◯ | ◎ |
◎:特に適しているため推奨
◯:キャリブレーション可
×:キャリブレーション不可
また、精度に関しては以下のような傾向があります。
CircleGrid = Asymmetry-CircleGrid > CheckerBoard ≧ ChArUco
おわりに
#今回はOpenCVで使用できるキャリブレーションパターンについて紹介しました。
OpenCVでカメラのキャリブレーションを行いたいがどのようなパターンを使用すれば良いかわからない、といった方々の助けになれば幸いです。