Manipulate PLC Data at Will with C# and TwinCAT ADS! Hands-on Learning of Integration Basics
Back to TopTo reach a broader audience, this article has been translated from Japanese.
You can find the original version here.
In this article, we will introduce how to integrate with PLC data on TwinCAT using ADS communication with C#.
Is C# Popular for Robot Control?
#In system development, a variety of programming languages are used. Python, JavaScript (Node.js, Deno), C#, Java, C++, C, etc., are major players. Recently, Rust and Go have also become popular.
In robot control and factory automation, many languages are also used. Vendors that provide services and devices supply APIs and libraries when offering their products to systems. Therefore, it is desirable to provide them in programming languages with a large user base or as open standards. AI-related or open-source solutions are often provided as Python modules, but in licensing businesses, I feel that libraries are frequently provided in C#.
Reasons include:
- Large user base
- Easy to use (low barrier to entry)
- Abundant convenient libraries (reducing development costs by combining them)
- Good compatibility with vendor-provided Windows GUI applications and simulators (developed in C#)
- Vendors find it easy to develop libraries themselves
- Closed source (for licensing business, etc.)
- Runs on Linux (.NET Core) as well
There are also offerings as Python modules, but in those cases, the core library is implemented in C++ or similar (for closed source or performance reasons), and Python is provided as a wrapper to use that library.
What is ADS Communication?
#ADS (Automation Device Specification) is a proprietary communication protocol developed by Beckhoff Automation. It operates over TCP/IP or UDP/IP and is used for data exchange between software modules inside and outside the TwinCAT system.
A C# (.NET) library is provided, and you can start using it immediately if you have a TwinCAT environment set up.
TwinCAT acts as a hub, enabling monitoring and manipulation of TwinCAT PLC variables via the ADS protocol.
Please refer to the series article "Starting Software PLC Development with TwinCAT" "Part 1: Environment Setup".
Example System Configuration Using TwinCAT ADS
#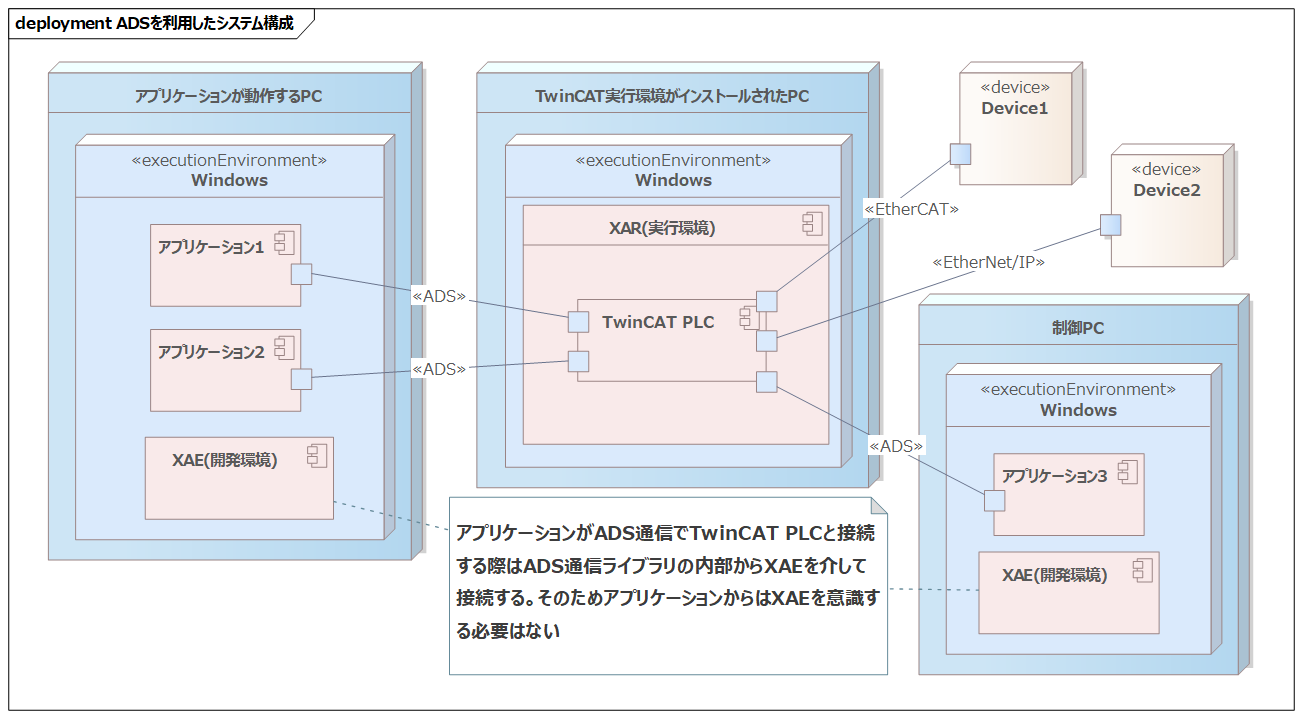
The system is structured around the TwinCAT PLC. Therefore, XAR (runtime environment) is required. Also, to integrate Applications 1–3 with TwinCAT via ADS communication, XAE (development environment) is necessary.
Integration Method
TwinCAT acts as a hub, connecting devices and applications via industrial networks and ADS, enabling data integration through TwinCAT.
- TwinCAT PLC and Applications 1–3 are connected via
ADS - TwinCAT PLC and Device1 are connected via
EtherCAT - TwinCAT PLC and Device2 are connected via
EtherNet/IP
By adding dedicated hardware modules to the TwinCAT PLC, it is possible to receive measured temperatures from thermometers as analog voltage values. Additionally, by purchasing a software license for network communication, you can receive data via socket communications.
Use Cases
When global variables are defined on the TwinCAT PLC, they can be used for the following:
- Sensor control
- Receiving sensor data
- Monitoring and manipulation of TwinCAT PLC variables
- Integration with devices and robots, etc.
- RPC to programs (Function Blocks) on the TwinCAT PLC
- Inter-process communication via TwinCAT
Setting values for global variables on the TwinCAT PLC is done by programs running on TwinCAT.
For details, please see the series article "Starting Software PLC Development with TwinCAT" "Part 2: Programming in ST Language (1/2)".
Installing the Library
#Install Beckhoff.TwinCAT.Ads via the NuGet package manager and add it to your project's references. The update cycle (mainly bug fixes) is relatively fast, with minor versions released every few months. I have updated it several times, and because it maintains backward compatibility, existing code continues to work without issues.
Correspondence Between TwinCAT Data Types and C# Data Types
#The correspondence table between TwinCAT data types and C# data types is as follows. Note that INT corresponds to short, REAL corresponds to float, and there are several items that require special attention.
| TwinCAT Data Type | Bit Width | C# Data Type | Description |
|---|---|---|---|
| BOOL | 8 bit | byte | Boolean value / although described as 1-bit bool, it is internally treated as 1 byte (Important) |
| BYTE | 8 bit | byte | Unsigned 8-bit integer |
| SINT | 8 bit | sbyte | Signed 8-bit integer |
| USINT | 8 bit | byte | Unsigned 8-bit integer |
| INT | 16 bit | short | Signed 16-bit integer (Important) |
| UINT | 16 bit | ushort | Unsigned 16-bit integer |
| DINT | 32 bit | int | Signed 32-bit integer |
| UDINT | 32 bit | uint | Unsigned 32-bit integer |
| LINT | 64 bit | long | Signed 64-bit integer |
| ULINT | 64 bit | ulong | Unsigned 64-bit integer |
| REAL | 32 bit | float | Single-precision floating-point (Important) |
| LREAL | 64 bit | double | Double-precision floating-point |
| ENUM | 16 bit | short | Signed 16-bit integer (Important) |
| STRING | 1 byte/char | string | 1 byte per character byte array + terminating NULL (0) character (Important) |
| TIME | 32 bit | TimeSpan | Unsigned integer in milliseconds |
TwinCAT-side Configuration
#Register variables with the following settings:
- Under the
PlcProjectproject →GVLs, define a global variable list namedGVL_Test(name is arbitrary). - Set the variable name to
TestDatawith the data typeDINT.
{attribute 'qualified_only'}
VAR_GLOBAL
TestData : DINT;
END_VAR
Now, let's try accessing the TestData variable from C#.
Accessing Variables with AdsClient
#AdsClient serves as the gateway when accessing TwinCAT. Numeric data can be read and written in the same way.
using System;
using TwinCAT.Ads;
namespace AdsComponent
{
class Program
{
static void Main(string[] args)
{
// Create an instance of AdsClient
AdsClient client = new AdsClient();
// Connect to TwinCAT
// 1st argument: AmsNetId string
// 2nd argument: Port number (for TwinCAT3 PLC, it is 851)
client.Connect("192.168.1.101.1.1", 851);
// Create a handle to refer to a TwinCAT global variable
// Specify using "GlobalVariableListName.VariableName" defined on the TwinCAT side
uint handle = client.CreateVariableHandle("GVL_Test.TestData");
// Write operation
int writeValue = 123;
client.WriteAny(handle, writeValue);
// Read operation
int readValue = (int)client.ReadAny(handle, typeof(int));
Console.WriteLine($"read:{readValue}");
// Release the handle
client.DeleteVariableHandle(handle);
// Close the connection and release resources
client.Close();
client.Dispose();
}
}
}
Please specify the AmsNetId displayed in the "ADS Communication Route Settings" section of the series article "Starting Software PLC Development with TwinCAT" "Part 1: Environment Setup".
Data Change Callback Notification
#To monitor whether the TwinCAT-side GVL_Test.TestData variable has changed, periodic polling using ReadAny() is inefficient and requires manual thread management. To address this, there is a mechanism that automatically sends a callback notification to the client when the value changes.
private AdsClient _adsClient; // Instance is created and connection is assumed established
private uint _handleNotification = 0;
// Start data change notification
public void StartValueChangeNotification()
{
// Register the event handler
_adsClient.AdsNotificationEx += OnAdsNotified;
// Register the data change notification handle (start notification)
_handleNotification = _adsClient.AddDeviceNotificationEx(
"GVL_Test.TestData",
// Notify when a change occurs every 50 ms
// Set the maximum delay time to 0 ms
new NotificationSettings(AdsTransMode.OnChange, 50, 0),
null,
typeof(int));
}
// Event reception
private void OnAdsNotified(object sender, AdsNotificationExEventArgs evn)
{
if (evn.Handle != _handleNotification)
{
return;
}
var data = (int)evn.Value;
Console.WriteLine($"notified:{data}");
}
// Stop data change notification
public void StopValueChangeNotification()
{
// Delete the data change notification handle (stop notification)
_adsClient.DeleteDeviceNotification(_handleNotification);
_handleNotification = 0;
// Unregister the event handler
_adsClient.AdsNotificationEx -= OnAdsNotified;
}
After calling StartValueChangeNotification(), if the value of GVL_Test.TestData is updated on the TwinCAT side, OnAdsNotified() will be called back on the C# side. When you finish handling callback notifications, be sure to call StopValueChangeNotification() to release the handle.
To manually update the definition and value of a global variable, log in to the PLC using the "3.3 Verifying Operation by Logging In" section of the series article "Starting Software PLC Development with TwinCAT" "Part 2: Programming in ST Language (1/2)", and directly overwrite the variable's value.
Cyclic Callback Notification
#By changing the parameters of data change callback notifications, periodic notifications are also possible.
// Start periodic notification
public void StartCyclicNotification()
{
// Register the event handler
_adsClient.AdsNotificationEx += OnAdsNotified;
// Register the cyclic notification handle (start notification)
_handleNotification = _adsClient.AddDeviceNotificationEx(
"GVL_Test.TestData",
// Notify every 10 ms
// Set maximum delay time to 1 ms
new NotificationSettings(AdsTransMode.Cyclic, 10, 1),
null,
typeof(int));
}
Specifying AdsTransMode.Cyclic results in cyclic notifications. When setting the notification interval to 10 ms and the maximum delay to 1 ms, delays of 1 ms occasionally occurred, but notifications were received almost exactly every 10 ms. It seems that TwinCAT, running in kernel mode, can notify values at precise intervals. On the C# side, which is just a regular Windows application, one might expect delays due to Windows OS scheduling accuracy or network driver receiving processes, but these did not seem to cause issues. It's a curious phenomenon that I'd like to investigate sometime.
Defining Structures
#Not only primitive types but also structures can be used for Read/Write data and callback notification data types. Structures can also be nested. First, as an example, define a structure DUT_Sample on the TwinCAT side.
// DUT_Sample structure definition
TYPE DUT_Sample :
STRUCT
IsValid : BOOL; // BOOL type
Height : DINT; // DINT type
CurrentMode : EMode; // ENUM type
Status : DUT_Status; // structure
END_STRUCT
END_TYPE
// EMode ENUM type definition
{attribute 'strict'}
{attribute 'to_string'}
TYPE EMode :
(
Vertical := 0,
Horizontal := 1
);
END_TYPE
// DUT_Status structure definition
TYPE DUT_Status :
STRUCT
Status1 : DINT;
Status2 : DINT;
END_STRUCT
END_TYPE
Add Sample to the global variable list GVL_Test.
{attribute 'qualified_only'}
VAR_GLOBAL
TestData : DINT;
Sample : DUT_Sample;
END_VAR
Define the same structure on the C# side so that the global variable GVL_Test.Sample can be handled on the C# side. However, be aware of alignment issues (rules for data alignment in memory). TwinCAT 3 uses an 8-byte alignment by default, so you need to define the C# side structure accordingly.
- Apply the attribute
[StructLayout(LayoutKind.Sequential, Pack = 8)]to the structure - Match non-structure data types to the "Correspondence Between TwinCAT Data Types and C# Data Types"
- Ensure the order of variable definitions matches the TwinCAT side
Note that while it is not mandatory to match variable and structure names with the TwinCAT side, doing so clarifies the correspondence and is recommended.
// Sample structure
[StructLayout(LayoutKind.Sequential, Pack = 8)]
public struct Sample
{
public byte IsValid; // BOOL type => byte
public int Height; // DINT type => int
public EMode CurrentMode; // ENUM type => EMode
public Status Status; // structure => Status
}
// EMode definition
public enum EMode : short // ENUM type => short
{
Vertical,
Horizontal,
}
// Status structure
[StructLayout(LayoutKind.Sequential, Pack = 8)]
public struct Sample
{
public int Status1; // DINT => int
public int Status2; // DINT => int
}
Using a cast and typeof(), for example int readValue = (Sample)client.ReadAny(handle, typeof(Sample));, you can use the same API as for primitive types.
Reading/Writing Strings (string)
#On the TwinCAT side, you can handle strings with the STRING type. However, it is treated as ASCII (Latin-1) with 1 byte per character, so writing Japanese directly will cause garbled text. Also, you need to specify the number of bytes when defining it. Therefore, specify encoding as UTF-8 in the definition.
{attribute 'qualified_only'}
VAR_GLOBAL
TestData : DINT;
Sample : DUT_Sample;
// Application layer transmission data
{attribute 'TcEncoding':='UTF-8'}
Message : STRING(1024);
END_VAR
- By adding the
{attribute 'TcEncoding':='UTF-8'}to the variable definition, you make it interpret the character encoding as UTF-8 - Specify the character size in bytes
- The character size should include the terminating NULL (0) character
For UTF-8, the number of bytes per character is variable (1 to 4 bytes). Typical Japanese characters use 3 bytes, so specify a generous byte size.
using System.Text;
private const int STRING_SIZE = 1024;
private AdsClient _adsClient; // Assume instance is created and connection is established
private uint _handle; // Assume it refers to 'GVL_Test.Message'
// Writing a string
public void WriteMessage(string message)
{
// Convert the UTF-8 string to a byte array
byte[] utf8Bytes = Encoding.UTF8.GetBytes(message);
// Check the byte size
if (utf8Bytes.Length > STRING_SIZE)
{
throw new Exception("Byte count exceeded");
}
// The buffer is initially filled with NULL (0) characters
byte[] targetBuffer = new byte[STRING_SIZE];
// Copy the converted byte array to the start of the fixed-length array
Buffer.BlockCopy(utf8Bytes, 0, targetBuffer, 0, utf8Bytes.Length);
_adsClient.WriteAny(_handle, targetBuffer);
}
// Reading a string
public string ReadMessage()
{
// Retrieve the fixed-length byte array (including the terminating NULL character)
var byteArray = (byte[])_adsClient.ReadAny(
_handle, typeof(byte[]), new int[] {STRING_SIZE});
// Find the first NULL character (0) in the byte array
int nullCharIndex = Array.IndexOf(byteArray, (byte)0);
// If a NULL character is found, treat everything up to it as the string
if (nullCharIndex >= 0)
{
// GetString(byteArray, start index, length)
return Encoding.UTF8.GetString(byteArray, 0, nullCharIndex);
}
// If no NULL character is found (the buffer is filled with the string),
// convert the entire array
return Encoding.UTF8.GetString(byteArray);
}
Handling UTF-8 strings requires slightly more verbose code compared to other data types. Because strings are sent and received as byte arrays of the defined size, even if you only want to send one character, the remainder is filled with NULL characters and the full buffer size is transferred.
Conclusion
#I hope you now understand how to handle various data types with ADS communication and how to use callback notifications. By applying this, you can perform RPC and inter-process communication. When integrating "Process A on PC1" and "Process B on PC2", if you define the data type as a JSON string (e.g., STRING(1024)), you can build a distributed processing system using generic data. Also, by cleverly using callback notifications, you might be able to implement a Publish/Subscribe-type system that treats variables on TwinCAT as topics.
Beckhoff has published the ADS communication protocol specifications on their website, and there are open-source ADS communication libraries available. Therefore, it seems possible to perform ADS communication from Python, Node.js, Go, and so on. However, keep in mind that you cannot receive support from Beckhoff for these open-source libraries.