Let's Solve Nonlinear Least Squares Problems Using the CeresSolver Optimization Library
Back to TopTo reach a broader audience, this article has been translated from Japanese.
You can find the original version here.
This article is the Day 10 entry of the Mamezou Developer Site Advent Calendar 2025.
0. Introduction
#In areas like robot control and image processing, you often need to solve optimization problems. Even within optimization, there are many types—linear programming, combinatorial optimization, and so on. Among these, the “least squares problem” is particularly common in practice. This problem seeks the parameter vector x that minimizes the following objective function F(x):
(Here, x is generally a vector.)
Here, (r_i(\boldsymbol{x})) is called the residual, representing the difference between the observed data (measured value) (y_i) and the predicted value (theoretical value) (f_i(\boldsymbol{x})):
In this article, we introduce Google’s solver “Ceres Solver”, which efficiently solves such nonlinear least squares problems.
1. Environment for This Article
#This article targets Ubuntu 24.04. The author uses WSL2, but native Ubuntu works just as well.
Although this article uses Ubuntu for the examples, Ceres Solver also works on Windows.
For details, see:
http://ceres-solver.org/installation.html#windows
2. Setting Up the Environment
#These are the preparations needed to use CeresSolver. It’s a bit long, so thank you for your patience.
Installing Required Libraries
#First, install the tools necessary to build Ceres Solver. Run each of the following lines one by one:
# apt update (you will be prompted for your password)
sudo apt update && sudo apt upgrade -y
# Build tools
sudo apt install build-essential
# Git
sudo apt install git
# CMake
sudo apt install cmake
# google-glog + gflags
sudo apt install libgoogle-glog-dev libgflags-dev
# Use ATLAS for BLAS & LAPACK
sudo apt install libatlas-base-dev
# Eigen3
sudo apt install libeigen3-dev
# SuiteSparse (optional)
sudo apt install libsuitesparse-dev
Creating the Workspace
#Next, create a workspace. Here, we’ll make ceres_solver_ws in the home directory:
mkdir ~/ceres_solver_ws
In a typical Linux environment, “~” represents your home directory, i.e. /home/${USER}/.
Cloning the CeresSolver Library
#Once the workspace is ready, clone the CeresSolver source into an external directory. Use --recursive to fetch submodules:
cd ~/ceres_solver_ws
mkdir external
cd external
git clone --recursive https://github.com/ceres-solver/ceres-solver
Alternatively, you can use:
git clone --recurse-submodules ${repo-url}
Building & Installing CeresSolver
#Build CeresSolver with CMake:
cd ceres-solver
mkdir build
cmake -S . -B build
cmake --build build
If you see:
CMake Error at CMakeLists.txt:33 (project):
No CMAKE_CXX_COMPILER could be found.
install the build-essential package:
sudo apt install build-essential
Building can take time. To speed it up with parallel jobs:
cmake --build build -- -j$(nproc)
nproc outputs the number of available CPU cores.
If you see 100% completion like this, the build succeeded:
[100%] Built target pose_graph_3d
Finally, install:
sudo cmake --install build
source ~/.bashrc
3. Solving a Simple Optimization Problem
#Creating the CMakeLists.txt and Source File
#Return to ~/ceres_solver_ws and create CMakeLists.txt:
cd ~/ceres_solver_ws
touch CMakeLists.txt
Put this in CMakeLists.txt:
# Specify the minimum CMake version
cmake_minimum_required(VERSION 3.14)
# Define the project name
project(ceres-solver-sample)
# Output executables to the build directory
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${CMAKE_BINARY_DIR})
# Find Ceres
find_package(Ceres REQUIRED)
# Add subdirectory
add_subdirectory(src)
Then create src/CMakeLists.txt:
cd ~/ceres_solver_ws/src
touch CMakeLists.txt
Put this in src/CMakeLists.txt:
# simple-ols
add_executable(simple-ols simple-ols.cpp)
target_link_libraries(simple-ols absl::log_initialize Ceres::ceres)
Finally, create simple-ols.cpp:
cd ~/ceres_solver_ws/src
touch simple-ols.cpp
The structure is:
ceres_solver_ws/
├── CMakeLists.txt
└── src/
├── CMakeLists.txt
└── simple-ols.cpp
Implementing the Optimization Calculation
#In simple-ols.cpp, write:
#include <ceres/ceres.h>
#include <glog/logging.h>
#include <iostream>
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solver;
/// @brief Residual struct
/// @remark The optimization target is defined in the () operator
struct CostFunctor {
template <typename T>
bool operator()(const T* const x, T* residual) const {
// The optimization target expression in this case
residual[0] = T(5.0) - x[0];
return true;
}
};
/// @brief Main function
int main(int argc, char** argv) {
// Define the initial value
double initial_x = 1.0;
double x = initial_x;
// Define the cost function
CostFunction* cost_function =
new AutoDiffCostFunction<CostFunctor, 1, 1>();
// Define the optimization problem
Problem problem;
problem.AddResidualBlock(cost_function, nullptr, &x);
problem.SetParameterLowerBound(&x, 0, 0.0);
problem.SetParameterUpperBound(&x, 0, 10.0);
// Define solver options
Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
options.max_num_iterations = 10;
// Summary of results
Solver::Summary summary;
// Run the optimization
Solve(options, &problem, &summary);
// Output results (x is updated)
std::cout << summary.BriefReport() << std::endl;
std::cout << "x: " << initial_x << " -> " << x << std::endl;
return 0;
}
Program Details
#Cost Definition
#/// @brief Residual struct
/// @remark The optimization target is defined in the () operator
struct CostFunctor {
template <typename T>
bool operator()(const T* const x, T* residual) const {
// The optimization target expression in this case
residual[0] = T(5.0) - x[0];
return true;
}
};
- The calculation goes in
operator(). - The template type T is used during optimization (specifically
ceres::Jet). - Cast built-in types to T when needed.
Defining the Cost Function
#CostFunction* cost_function =
new AutoDiffCostFunction<CostFunctor, 1, 1>();
Template arguments:
- Cost struct type
- Residual dimension
- Parameter dimension
Defining the Optimization Problem
#Problem problem;
problem.AddResidualBlock(cost_function, nullptr, &x);
problem.SetParameterLowerBound(&x, 0, 0.0);
problem.SetParameterUpperBound(&x, 0, 10.0);
You can specify a loss function in the second argument of AddResidualBlock. See
http://ceres-solver.org/nnls_tutorial.html#robust-curve-fitting.
Build and Run
#cd ~/ceres_solver_ws
cmake -S . -B bin
cmake --build bin
./bin/simple-ols
You should see:
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 8.000000e+00 0.00e+00 4.00e+00 0.00e+00 0.00e+00 1.00e+04 0 1.35e-05 4.40e-05
1 7.998400e-08 8.00e+00 4.00e-04 0.00e+00 1.00e+00 3.00e+04 1 8.09e-05 1.88e-04
2 8.886518e-17 8.00e-08 1.33e-08 4.00e-04 1.00e+00 9.00e+04 1 3.24e-05 2.39e-04
Ceres Solver Report: Iterations: 3, Initial cost: 8.000000e+00, Final cost: 8.886518e-17, Termination: CONVERGENCE
x: 1 -> 5
Changing the Input Parameter Bounds
#Change the upper bound from 10 to 3:
problem.SetParameterUpperBound(&x, 0, 3.0); // changed from 10 to 3
Rebuild and run; you’ll get:
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 8.000000e+00 0.00e+00 2.00e+00 0.00e+00 0.00e+00 1.00e+04 0 1.21e-05 4.23e-05
1 2.000000e+00 6.00e+00 0.00e+00 0.00e+00 7.50e-01 1.14e+04 1 6.80e-05 1.66e-04
Ceres Solver Report: Iterations: 2, Initial cost: 8.000000e+00, Final cost: 2.000000e+00, Termination: CONVERGENCE
x: 1 -> 3
4. Numerically Solving the Inverse Kinematics of a 4-DOF Planar Manipulator
#In Chapter 3, we solved a scalar optimization problem. Now, we tackle a more complex nonlinear problem: the inverse kinematics of a 4-DOF planar manipulator.
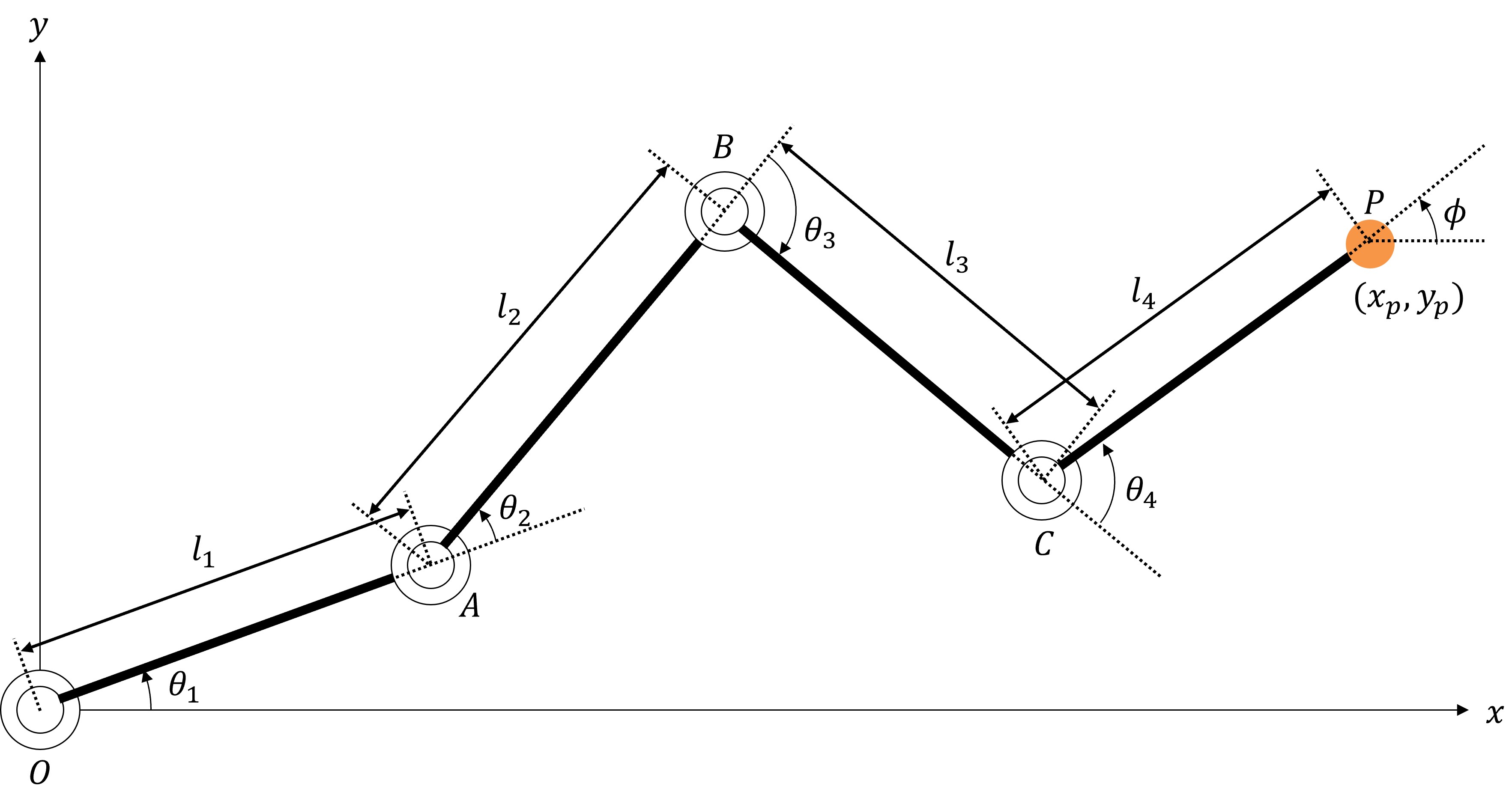
What is a 4-DOF Planar Manipulator?
#Consider a planar manipulator with four joints as shown. We’ll implement its inverse kinematics. Parameters:
- Link lengths: (L_i)
- Joint angles: (\theta_i) (i=1..4), positive ccw
- End effector position: ((x_p, y_p))
- End effector orientation: (\phi)
Forward Kinematics Calculation
#Define:
[
\boldsymbol{\theta} =
\begin{bmatrix}
\theta_1 \ \theta_2 \ \theta_3 \ \theta_4
\end{bmatrix}, \quad
\boldsymbol{p} =
\begin{bmatrix}
x_p \ y_p \ \phi
\end{bmatrix}.
]
Vectors:
[
\vec{OA} =
\begin{bmatrix}
L_1 \cos\theta_1 \ L_1 \sin\theta_1
\end{bmatrix},\quad
\vec{AB} =
\begin{bmatrix}
L_2 \cos(\theta_1+\theta_2) \ L_2 \sin(\theta_1+\theta_2)
\end{bmatrix},
]
[
\vec{BC} =
\begin{bmatrix}
L_3 \cos(\theta_1+\theta_2+\theta_3) \ L_3 \sin(\theta_1+\theta_2+\theta_3)
\end{bmatrix},\quad
\vec{CP} =
\begin{bmatrix}
L_4 \cos(\theta_1+\theta_2+\theta_3+\theta_4) \ L_4 \sin(\theta_1+\theta_2+\theta_3+\theta_4)
\end{bmatrix}.
]
Then:
[
\begin{bmatrix}
x_p \ y_p
\end{bmatrix}
= \vec{OA} + \vec{AB} + \vec{BC} + \vec{CP},\quad
\phi = \theta_1+\theta_2+\theta_3+\theta_4.
]
So:
[
\boldsymbol{p} = f(\boldsymbol{\theta}).
]
Inverse Kinematics Calculation
#Inverse kinematics finds (\boldsymbol{\theta}) given (\boldsymbol{p}):
[
\boldsymbol{\theta} = f^{-1}(\boldsymbol{p}).
]
This is generally harder; we solve it numerically with CeresSolver.
Code Implementation
#Creating Directories and CMakeLists.txt
#cd ~/ceres_solver_ws/src
mkdir 4dof-ik
cd 4dof-ik
touch CMakeLists.txt
In src/CMakeLists.txt, add:
# simple-ols
add_executable(simple-ols simple-ols.cpp)
target_link_libraries(simple-ols absl::log_initialize Ceres::ceres)
# Register the 4dof-ik directory as a subdirectory
add_subdirectory(4dof-ik)
Defining Data Structures
#cd ~/ceres_solver_ws/src/4dof-ik
touch Pose.hpp KinematicsParameters.hpp
Pose.hpp:
/// @brief Pose (position and orientation)
struct Pose {
/// @brief X coordinate
double x;
/// @brief Y coordinate
double y;
/// @brief End effector orientation
double phi;
Pose(double x_, double y_, double phi_)
: x(x_), y(y_), phi(phi_) {}
};
KinematicsParameters.hpp:
/// @brief Kinematic parameters (link lengths)
struct KinematicParameters {
/// @brief Link 1 length
double L1;
/// @brief Link 2 length
double L2;
/// @brief Link 3 length
double L3;
/// @brief Link 4 length
double L4;
/// @brief Constructor
KinematicParameters(double l1, double l2, double l3, double l4)
: L1(l1), L2(l2), L3(l3), L4(l4) {}
};
Implementing the Optimization Calculation
#touch 4dof-ik.cpp
4dof-ik.cpp:
#include <iostream>
#include <ceres/ceres.h>
#include <ceres/rotation.h>
#include <cmath>
#include "Pose.hpp"
#include "KinematicsParameters.hpp"
/// @brief Perform forward kinematics
template <typename T>
void compute_forward_kinematics(const KinematicParameters& kp,
const T* const theta,
T& x, T& y, T& phi) {
x = T(kp.L1)*cos(theta[0])
+ T(kp.L2)*cos(theta[0]+theta[1])
+ T(kp.L3)*cos(theta[0]+theta[1]+theta[2])
+ T(kp.L4)*cos(theta[0]+theta[1]+theta[2]+theta[3]);
y = T(kp.L1)*sin(theta[0])
+ T(kp.L2)*sin(theta[0]+theta[1])
+ T(kp.L3)*sin(theta[0]+theta[1]+theta[2])
+ T(kp.L4)*sin(theta[0]+theta[1]+theta[2]+theta[3]);
phi = theta[0] + theta[1] + theta[2] + theta[3];
}
/// @brief Cost function for inverse kinematics
struct IKCostFunction {
Pose target_pose;
KinematicParameters kp;
IKCostFunction(const Pose& pose, const KinematicParameters& param)
: target_pose(pose), kp(param) {}
template<typename T>
bool operator()(const T* const theta, T* residuals) const {
T x, y, phi;
compute_forward_kinematics(kp, theta, x, y, phi);
residuals[0] = T(target_pose.x) - x; // X error
residuals[1] = T(target_pose.y) - y; // Y error
residuals[2] = T(target_pose.phi) - phi; // Orientation error
return true;
}
};
int main(int argc, char** argv) {
// Define kinematic parameters
double l1 = 1.5, l2 = 1.5, l3 = 1.0, l4 = 1.0;
// Define target pose
double x_target = 3.2, y_target = 0.8, phi_target = -M_PI_4;
// Initial joint angles
double theta[4] = {0.0, 0.0, 0.0, 0.0};
KinematicParameters kp(l1, l2, l3, l4);
Pose target_pose{x_target, y_target, phi_target};
// Define the optimization problem
ceres::Problem problem;
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<IKCostFunction, 3, 4>(
new IKCostFunction(target_pose, kp)),
nullptr,
theta);
// Apply bounds (-π to π)
for (int i = 0; i < 4; ++i) {
problem.SetParameterLowerBound(theta, i, -M_PI);
problem.SetParameterUpperBound(theta, i, M_PI);
}
// Solver options
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
options.max_num_iterations = 100;
options.function_tolerance = 1e-6;
// Solve
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
// Output results
std::cout << summary.BriefReport() << std::endl;
if (summary.termination_type == ceres::CONVERGENCE) {
std::cout << "✅ IK Solution Found! (Final Cost: " << summary.final_cost << ")\n";
} else {
std::cout << "❌ IK Failed to Converge.\n";
}
// Output joint angles
for (int i = 0; i < 4; ++i)
std::cout << "theta[" << i << "] = " << theta[i] << std::endl;
// Verify forward kinematics
std::cout << "Check Forward Kinematics Calculation:" << std::endl;
double x_result, y_result, phi_result;
compute_forward_kinematics(kp, theta, x_result, y_result, phi_result);
std::cout << "x = " << x_result << std::endl;
std::cout << "y = " << y_result << std::endl;
std::cout << "phi = " << phi_result << std::endl;
return 0;
}
Adding to CMakeLists.txt
#In 4dof-ik/CMakeLists.txt:
# 4dof-ik
add_executable(4dof-ik 4dof-ik.cpp)
target_link_libraries(4dof-ik absl::log_initialize Ceres::ceres)
Build & Run
#cd ~/ceres_solver_ws
cmake --build bin
./bin/4dof-ik
You should see:
Ceres Solver Report: Iterations: 7, Initial cost: 2.248425e+00, Final cost: 4.808292e-20, Termination: CONVERGENCE
✅ IK Solution Found! (Final Cost: 4.80829e-20)
theta[0] = -0.414376
theta[1] = 1.25568
theta[2] = 0.609086
theta[3] = -2.23579
Check Forward kinematics calculation:
x = 3.2
y = 0.8
phi = -0.785398
5. Conclusion
#In this article, we introduced how to solve optimization problems using CeresSolver. Beyond the samples shown here, many examples are available on the official site:
http://ceres-solver.org/nnls_tutorial.html#non-linear-least-squares
The code from this article is also available at:
https://github.com/hayat0-ota/CeresSolver_tutorial