Speed Up Builds with Ninja! A Comprehensive Guide to Its Usage
Back to TopTo reach a broader audience, this article has been translated from Japanese.
You can find the original version here.
Introduction
#Recently, I've been working with the build tool Make, and I thought, "It's apparently been used for a long time, but are there any newer build tools that are becoming widespread?" Upon investigating, I found information suggesting that a tool called Ninja is excellent, so I'd like to summarize my experience trying it out.
Features of Ninja
#Ninja is a build system that boasts faster operation compared to Make.
It was developed to speed up builds in large-scale projects, such as compiling a single executable from approximately 40,000 C++ code files like Google Chrome. [1]
It has set the following design goals. [2]
- Enable very fast incremental builds even for huge projects
- Have minimal policy about how code is built
- Correctly understand dependencies even in situations where Makefiles might not
- Prefer speed over convenience when they conflict
Conversely, the following items are explicitly not design goals.
- Convenient syntax for writing build files by hand
- Ninja files should be generated using other programs. (CMake and Meson support this. (Author's note))
- Built-in rules
- Unlike Make, Ninja does not have implicit rules for compiling C code.
- Build-time customization
- Command options should be included in the program that generates the Ninja files.
- Build-time conditionals and search paths
- Avoid decision-making processes that are slow.
GitHub Stars are increasing, and it seems to be spreading smoothly.
Star History Chart
You can check detailed specifications from the manual.
Trying It Out
#In the case of Ubuntu, install it with the following command.
$ sudo apt-get install ninja-build
The ninja Command
#Use the ninja command to execute the build.
Run it in the following format.
ninja [options] [target name...]
Configuration File (build.ninja)
#When you execute ninja, by default, it reads the settings from a file called build.ninja in the current directory.
To specify a file name when running, use the option ninja -f filepath.
Let's look at how to write the configuration file.
The basic format is as follows.
rule rule_name
command = command
build target: rule_name dependencies
Broadly speaking, you will describe it using two declarations: rule and build.
- In the
buildstatement, you associate the target (the file you want to create) with the rule (how to create it) and dependencies (files needed to create it).
You can specify multiple file names for both targets and dependencies, separated by spaces. - In the
rulestatement, you describe the command to execute to create the file, followingcommand =.
Sample
#Here's a simple example.
rule r1
command = echo "DEP sample" > $out
rule r2
command = echo "TEST `cat $in`" > $out
build test.txt: r2 dep.txt
build dep.txt: r1
In the above configuration, the process is written to save to test.txt the text that adds the string TEST to the text content of dep.txt.
Explanation of the Sample
#-
Indicates that the file
build test.txt: r2 dep.txttest.txtis created by ruler2using the filedep.txt.
Ifdep.txtdoes not exist, thebuildstatement wheredep.txtis a target is executed. -
Indicates that the file
build dep.txt: r1dep.txtis created by ruler1. There are no dependencies. -
In rule
rule r1 command = echo "DEP sample" > $outr1, it executes a command to create a file with the textDEP sample.
$outis a built-in variable provided by Ninja, which expands to the target name specified in thebuildstatement. In this example, it'sdep.txt. -
In rule
rule r2 command = echo "TEST `cat $in`" > $outr2, it executes a command to create a file with text that adds the stringTESTto the content of the input file.
$inis also a built-in variable provided by Ninja, which expands to the dependency file names specified in thebuildstatement. In this example, it'sdep.txt.
Execution Result of the Sample
#Let's execute the build using this configuration file. As with Make, you can confirm that the target creation is skipped if there is no change to the dependencies.
$ ninja test.txt
[2/2] echo "TEST `cat dep.txt`" > test.txt
# Check file contents
$ cat dep.txt test.txt
DEP sample
TEST DEP sample
# Even if you run it again without doing anything, no updates are performed.
$ ninja test.txt
ninja: no work to do.
# Change the content of the dependency file.
$ echo "DEP sample 1" > dep.txt
# If the dependency file is updated, the target is recreated.
$ ninja test.txt
[1/1] echo "TEST `cat dep.txt`" > test.txt
# Check file contents
$ cat dep.txt test.txt
DEP sample 1
TEST DEP sample 1
That's the basic usage. It's very simple.
Dependency Graph
#I thought it was interesting that Ninja provides a tool to visualize file dependencies as a network graph, so I'd like to introduce it.
By using the ninja -t graph option, it outputs the file dependency graph in graphviz format.
For example, let's output the graph of the sample file mentioned at the beginning.
By installing graphviz in advance and passing it to the dot command as follows, it outputs the dependency graph image graph.png.
ninja -t graph | dot -Tpng -ograph.png
In the case of Ubuntu, you can install graphviz with the following command.
sudo apt install graphviz
An image like the following is output.
Dependencies and targets are represented as square nodes, and rules are represented as edges connecting them.
If there are no dependencies, the rule is represented as a circular node connected to the target.

Summary of Other Specifications
#There are other specifications that are useful to know, so let's check them.
Variables
#At the top level of the configuration file, you can define variables in the format variable_name = string.
To reference them, write $variable_name.
var = Mamezou
rule r
command = echo $var
build tag: r
$ ninja
[1/1] echo Mamezou
Mamezou
Escaping
#The escape character is $. If you want to use characters that have meaning within the ninja.build file (space, :, $ itself, newline), you should write them following $.
For example, if you want to write multiple commands on separate lines, you can write it as follows.
rule r4
command = echo "r4 sample" $
&& echo "r4-12 sample"
phony Rule
#There is a built-in rule called phony.
This rule does nothing when executed. Although it does nothing, it can be used to arbitrarily add dependencies to a target.
For example, you can define an alias foo for the file some/file.txt.
rule r1
command = cat $in > $out
build some/file.txt: r1 dep.txt
build foo: phony some/file.txt
You can specify foo as the target name when executing.
$ ninja foo
[1/1] cat dep.txt > some/file.txt
You can also use it to create a group target that aggregates multiple targets.
rule r1
command = echo "r1 sample"
rule r2
command = echo "r2 sample"
rule r3
command = echo "r3 sample"
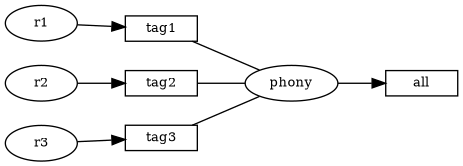
build all: phony tag1 tag2 tag3
build tag1: r1
build tag2: r2
build tag3: r3
The dependency graph is as follows.
$ ninja all
[1/3] echo "r1 sample"
r1 sample
[2/3] echo "r2 sample"
r2 sample
[3/3] echo "r3 sample"
r3 sample
Implicit Dependencies
#As already introduced, variables like $in and $out can be used in the commands described in the rules.
$in expands to the list of dependencies, and $out expands to the list of targets.
Also, in file specifications, files written after | are not expanded into these variables.
Here's an example configuration file using |.
rule r1
command = echo "DEP1 sample" > $out
rule r2
command = echo "DEP2 sample" > $out
rule r3
command = echo "TEST `cat $in`" > $out
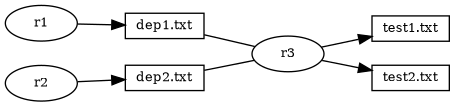
build test1.txt | test2.txt: r3 dep1.txt | dep2.txt
build dep1.txt: r1
build dep2.txt: r2
The dependency graph is as follows.
$ ninja test1.txt -v
[1/3] echo "DEP1 sample" > dep1.txt
[2/3] echo "DEP2 sample" > dep2.txt
[3/3] echo "TEST `cat dep1.txt`" > test1.txt
$ cat dep1.txt dep2.txt test1.txt
DEP1 sample
DEP2 sample
TEST DEP1 sample
In the execution of r3, $in expands only to dep1.txt, and $out expands only to test1.txt.
On the other hand, dep2.txt is recognized as a dependency file, and the rule r2 that creates dep2.txt is executed.
Also, even if you try to build the implicit target test2.txt directly, it is not created, but the processing to create its dependency file is executed.
$ ninja test2.txt -v
[1/3] echo "DEP1 sample" > dep1.txt
[2/3] echo "DEP2 sample" > dep2.txt
[3/3] echo "TEST `cat dep1.txt`" > test1.txt
$ cat dep1.txt dep2.txt test1.txt
DEP1 sample
DEP2 sample
TEST DEP1 sample
$ ls test2.txt
ls: cannot access 'test2.txt': No such file or directory
Order-Only Dependency
#Dependencies specified after || in the list of dependencies are considered order-only dependencies.
These dependencies are updated to the latest state, but are not considered when evaluating whether to rebuild the target.
By utilizing this property, you can ensure that dependencies are up to date while reducing unnecessary target rebuilds.
For example, let's compare the behavior when specifying dependencies that are order-only and those that are not.
In the following example, whether test2.txt is rebuilt is not affected by whether dep2.txt has been updated.
rule dep
command = echo "DEP sample" > $out
rule test
command = cat $in > $out
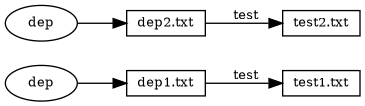
build test1.txt: test dep1.txt
build test2.txt: test || dep2.txt
build dep1.txt: dep
build dep2.txt: dep
The dependency graph is as follows.
# Assume that test1.txt and test2.txt already exist.
$ touch test1.txt
$ touch test2.txt
# When rebuilding test1.txt, since dep1.txt was updated (created here), the update process for test1.txt is executed.
$ ninja test1.txt -v
[1/2] echo "DEP sample" > dep1.txt
[2/2] cat dep1.txt > test1.txt
# When rebuilding test2.txt, although dep2.txt was updated (created here), no update process is executed for test2.txt.
$ ninja test2.txt -v
[1/1] echo "DEP sample" > dep2.txt
Dynamic Dependencies
#Next, let's introduce a feature to specify dependencies dynamically.
During the build process, you generate a file containing a list of build statements representing dependencies, and you can add dependencies by referring to that file.
Borrowing an example from the documentation, the following configuration performs tarball extraction.
In this configuration, if the tarball has been updated since the last extraction, it re-extracts it.
Also, even if the tarball has not been updated, if previously extracted files are missing for some reason, it re-extracts.
rule untar
command = tar xf $in && touch $out
rule scantar
command = scantar --stamp=$stamp --dd=$out $in
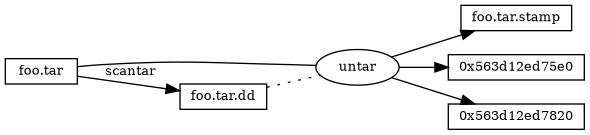
build foo.tar.dd: scantar foo.tar
stamp = foo.tar.stamp
build foo.tar.stamp: untar foo.tar || foo.tar.dd
dyndep = foo.tar.dd
It's a bit complicated, so let's go through the process step by step.
First, by executing ninja foo.tar.stamp, the following build statement is evaluated.
build foo.tar.stamp: untar foo.tar || foo.tar.dd
dyndep = foo.tar.dd
The rule untar is the extraction process. It performs the extraction and simultaneously creates foo.tar.stamp for timestamp recording.
dyndep = is a built-in keyword, and the file specified here foo.tar.dd is expected to contain additional targets and dependencies in a specified format[3]. This foo.tar.dd is generated dynamically based on the contents of the tarball. We specify foo.tar.dd as an Order-Only Dependency.
Next, the build process for foo.tar.dd is evaluated.
build foo.tar.dd: scantar foo.tar
stamp = foo.tar.stamp
Assuming scantar is a hypothetical command prepared here, this command reads the tarball and generates a file like the following based on its contents (for example, processing the result of tar tf).
ninja_dyndep_version = 1
build foo.tar.stamp | file1.txt file2.txt : dyndep
restat = 1
file1.txt and file2.txt are file names included in the tarball, and this describes adding them as (implicit) target files.
In this way, you can specify dependencies dynamically based on the contents of the tarball.
The dependency graph is as follows. (The target nodes pointing to file1.txt and file2.txt have unclear numbers—could this be a bug...?)
Parallel Execution
#Ninja performs builds in parallel execution by default.
Although it's a simple example that doesn't create files, let's check the operation with the following configuration file.
rule r1
command = sleep 2 && echo "r1 `date +%H:%M:%S`"
rule r2
command = sleep 2 && echo "r2 `date +%H:%M:%S`"
rule r3
command = sleep 2 && echo "r3 `date +%H:%M:%S`"
build tag: phony tag1 tag2 tag3
build tag1: r1
build tag2: r2
build tag3: r3
The target tag depends on three dependencies: tag1, tag2, and tag3,
and in their respective rules r1, r2, and r3, they wait for 2 seconds and output the time.
$ ninja tag
[1/3] sleep 2 && echo "r1 `date +%H:%M:%S`"
r1 19:49:04
[2/3] sleep 2 && echo "r2 `date +%H:%M:%S`"
r2 19:49:04
[3/3] sleep 2 && echo "r3 `date +%H:%M:%S`"
r3 19:49:04
If you look at the seconds in the time output, you can see that they were output at the same time because they were executed in parallel.
About Tool Options
#As we used when outputting the dependency graph above, the ninja command provides useful tools that can be used with the -t option.
browse- Display the dependency graph in a browser
ninja -t browse --port=8000 --no-browser mytarget(For some reason, it causes a runtime error on my machine 💦)
graph- Output the dependency graph in graphviz format
ninja -t graph mytarget | dot -Tpng -ograph.png- Install dot with
sudo apt install graphviz -y
targets- Output a list of targets
commands- Output a list of commands for the given target
inputs- Output a list of input files for the given target
clean- Delete build outputs
Conclusion
#This time, I summarized what I learned by trying out the build system tool Ninja. There are still other detailed specifications, so if you're interested, please check out the manual.
As stated in its design goals, Ninja configuration files are basically not written by hand, but it was interesting to understand how to read them and how to execute them. Particularly, the ability to output dependency graphs is convenient and seems useful even just for that.
Since it resolves dependencies much faster compared to Makefiles, I thought I'd like to try using it if I get the chance.