Ninjaでビルドを高速化!その使い方を徹底解説
Back to Topはじめに
#最近ビルドツールのMakeを触っていたのですが、「これって古くから使われているらしいけど他に何か新しいビルドツールで広まっているものあるのかな~?」と思ったので調べたところ、Ninjaというツールが良いぞという情報を得たので触ってみたことをまとめたいと思います。
Ninjaの特徴
#NinjaはMakeに比べて高速に動作することがウリのビルドシステムです。
Google Chromeのように約40,000ファイルのC++コードから単一の実行ファイルをコンパイルする大規模プロジェクトにおいて、そのビルドの高速化のために開発されました。[1]
以下のような設計目的を掲げています。[2]
- 巨大なプロジェクトでもとても高速なインクリメンタルビルドができる
- コードのビルド方法に関するポリシーをほとんど持たない
- Makefileであれば正しく理解するのが難しい状況でも、正しく依存関係を把握できる
- 利便性と速度が競合するときは、速度を優先する
逆に以下の事項は明確な設計目的とはしていないとしています。
- 手書きでビルドファイルを書くための便利な構文
- Ninjaファイルは他のプログラムを使用して生成するべきです。(CMakeやMesonなどが対応しています(筆者追記))
- 組み込みルール
- MakeのようなCコードをコンパイルするための暗黙的ルールはNinjaにはありません。
- ビルド時のカスタマイズ
- コマンドオプションはNinjaファイルを生成するプログラムに含めるべきです。
- ビルド時の条件分岐や検索パス
- 意思決定を行う処理は遅いので避けます。
GitHub Starも伸びていて順調に広まっているように見受けられます。
Star History Chart
マニュアルから詳細な仕様を確認できます。
使ってみる
#Ubuntuの場合、以下のコマンドでインストールします。
$ sudo apt-get install ninja-build
ninjaコマンド
#ninjaというコマンドを用いてビルド実行します。
以下の形式で実行します。
ninja [オプション] [ターゲット名...]
設定ファイル(build.ninja)
#ninjaを実行すると、デフォルトではカレントディレクトリにあるbuild.ninjaというファイルから設定を読み取ります。
ファイル名を指定して実行するときはninja -f ファイルパス というオプションを指定します。
では設定ファイルの書き方を見ていきましょう。
基本的な形式は以下のようになります。
rule ルール名
command = コマンド
build ターゲット: ルール名 依存ファイル
大きく分けて、ruleとbuildという2つの宣言文を用いて記述していくことになります。
build文では、ターゲット(作成したいファイル名)に対して、そのルール(作成方法)と依存ファイル(作成に必要なファイル)を対応付けます。
ターゲット、依存ファイルともに、複数のファイル名をスペース区切りで指定可能です。rule文では、ファイル作成のために実行するコマンドをcommand =に続けて記述します。
サンプル
#以下に簡単な例を挙げます。
rule r1
command = echo "DEP sample" > $out
rule r2
command = echo "TEST `cat $in`" > $out
build test.txt: r2 dep.txt
build dep.txt: r1
上記の設定では、dep.txtというファイルのテキスト内容にTEST という文字列を先頭に追加したテキストを、test.txtに保存するための処理が書かれています。
サンプルの解説
#-
build test.txt: r2 dep.txttest.txtというファイルを、dep.txtというファイルを用いてルールr2によって作成することを表します。
dep.txtが存在しない場合は、dep.txtがターゲットになっているbuild文を実行します。 -
build dep.txt: r1dep.txtというファイルを、ルールr1によって作成することを表します。依存ファイルはありません。 -
ルール
rule r1 command = echo "DEP sample" > $outr1では、DEP sampleというテキストが書かれたファイルを作成するコマンドを実行します。
$outというのはNinjaの組み込みの変数として用意されていて、build文で指定したターゲット名が展開されます。この例の場合はdep.txtとなります。 -
ルール
rule r2 command = echo "TEST `cat $in`" > $outr2では、入力ファイルの内容にTESTという文字列を追加したテキストが書かれたファイルを作成するコマンドを実行します。
$inというのもNinjaの組み込みの変数として用意されていて、build文で指定した依存ファイル名が展開されます。この例の場合はdep.txtです。
サンプルの実行結果
#それではこの設定ファイルを使ってビルド実行してみましょう。Makeと同様、依存ファイルの変更有無によってターゲット生成の実行スキップされることが確認できます。
$ ninja test.txt
[2/2] echo "TEST `cat dep.txt`" > test.txt
# ファイル内容確認
$ cat dep.txt test.txt
DEP sample
TEST DEP sample
# 何もせずに再実行しても更新は行われない。
$ ninja test.txt
ninja: no work to do.
# 依存ファイルの内容を変更する。
$ echo "DEP sample 1" > dep.txt
# 依存ファイルが更新されている場合はターゲットが再作成される。
$ ninja test.txt
[1/1] echo "TEST `cat dep.txt`" > test.txt
# ファイル内容確認
$ cat dep.txt test.txt
DEP sample 1
TEST DEP sample 1
基本的な使い方は以上になります。とてもシンプルですね。
依存関係グラフ
#Ninjaにはファイルの依存関係をネットワークグラフとして可視化するためのツールが用意されているのが面白いなと思ったので紹介します。
ninja -t graphというオプションを使うことで、ファイルの依存関係グラフをgraphviz形式で出力してくれます。
例えば最初に挙げたサンプルファイルのグラフを出力してみます。
事前にgraphvizをインストールして、以下のようにdotコマンドに渡すことで依存関係グラフの画像graph.pngを出力してくれます。
ninja -t graph | dot -Tpng -ograph.png
graphvizはUbuntuの場合は以下のコマンドでインストールできます。
sudo apt install graphviz
以下のような画像が出力されます。
依存ファイルとターゲットが四角のノードに表されていて、ルールがそれらを結ぶエッジとして表されます。
依存ファイルがない場合はルールが丸いノードに表されて、ターゲットと結ばれています。

その他の仕様まとめ
#他にも知っておくと便利な仕様がありますので確認していきましょう。
変数
#設定ファイルのトップレベルで 変数名 = 文字列という形式で変数を定義できます。
参照するときは$変数名と書きます。
var = 豆蔵
rule r
command = echo $var
build tag: r
$ ninja
[1/1] echo 豆蔵
豆蔵
エスケープ
#エスケープ文字は$です。ninja.buildファイルの中で意味を持つ文字(スペース,:,$自身,改行)を使いたいときは$に続けて書きます。
例えば複数のコマンドを改行して書きたい場合は以下のように書くことができます。
rule r4
command = echo "r4 sample" $
&& echo "r4-12 sample"
phony rule
#phonyという、組み込みで用意されているルールがあります。
このルールはなにも実行しないルールです。何も実行しないですがターゲットに対して任意に依存性を追加するために利用できます。
例えば以下のようにsome/file.txtというファイルにエイリアスとしてfooを定義できます。
rule r1
command = cat $in > $out
build some/file.txt: r1 dep.txt
build foo: phony some/file.txt
実行時のターゲット名としてsome/file.txtではなくfooと指定できます。
$ ninja foo
[1/1] cat dep.txt > some/file.txt
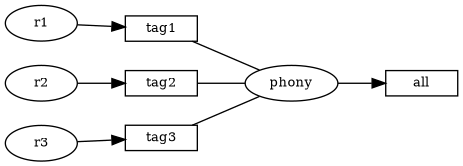
他にも複数のターゲットをまとめるグループ用ターゲットを作成することにも利用できます。
rule r1
command = echo "r1 sample"
rule r2
command = echo "r2 sample"
rule r3
command = echo "r3 sample"
build all: phony tag1 tag2 tag3
build tag1: r1
build tag2: r2
build tag3: r3
依存関係グラフは以下になります。
$ ninja all
[1/3] echo "r1 sample"
r1 sample
[2/3] echo "r2 sample"
r2 sample
[3/3] echo "r3 sample"
r3 sample
暗黙的な依存性
#既に紹介しましたが、ルールに記述するコマンドの中で$inや$outという変数を利用できました。
それぞれ、$inは依存ファイルのリスト、$outはターゲットのリストに展開されます。
また、ファイル指定の中で、|に続けて書いたファイルはこれらの変数に展開されません。
以下に、| を用いた設定ファイルの例を示します。
rule r1
command = echo "DEP1 sample" > $out
rule r2
command = echo "DEP2 sample" > $out
rule r3
command = echo "TEST `cat $in`" > $out
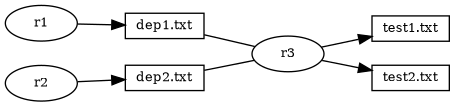
build test1.txt | test2.txt: r3 dep1.txt | dep2.txt
build dep1.txt: r1
build dep2.txt: r2
依存関係グラフは以下のようになります。
$ ninja test1.txt -v
[1/3] echo "DEP1 sample" > dep1.txt
[2/3] echo "DEP2 sample" > dep2.txt
[3/3] echo "TEST `cat dep1.txt`" > test1.txt
$ cat dep1.txt dep2.txt test1.txt
DEP1 sample
DEP2 sample
TEST DEP1 sample
r3実行時の $in には dep1.txtだけ、$out には test1.txt だけが展開されます。
一方で、dep2.txtは依存ファイルとしては認識されおり、dep2.txtの作成ルールのr2は実行されます。
また、暗黙的ターゲットのtest2.txtは、直接ビルドしようとしても作成されませんが依存ファイルの作成処理は実行されます。
$ ninja test2.txt -v
[1/3] echo "DEP1 sample" > dep1.txt
[2/3] echo "DEP2 sample" > dep2.txt
[3/3] echo "TEST `cat dep1.txt`" > test1.txt
$ cat dep1.txt dep2.txt test1.txt
DEP1 sample
DEP2 sample
TEST DEP1 sample
$ ls test2.txt
ls: cannot access 'test2.txt': No such file or directory
Order-Only Dependency
#依存ファイルの中で||に続けて指定したファイルは、その依存ファイルの最新化までは行うが、ターゲットを再ビルドをするかどうかの評価には考慮されないようになります。
この性質を利用して、依存ファイルが最新であることは保証しつつ、不要なターゲットの再ビルドを減らすことができます。
例えば次の例でOrder-Only Dependencyな依存ファイルとそうではない依存ファイルの場合の動作を比較してみましょう。
以下の例ではtest2.txtを再ビルドするかどうかの評価に、dep2.txtが更新されたかどうかが考慮されません。
rule dep
command = echo "DEP sample" > $out
rule test
command = cat $in > $out
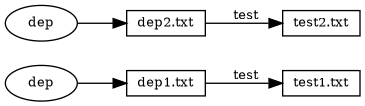
build test1.txt: test dep1.txt
build test2.txt: test || dep2.txt
build dep1.txt: dep
build dep2.txt: dep
依存関係グラフは以下です。
# test1.txt, test2.txtは既に存在しているとします。
$ touch test1.txt
$ touch test2.txt
# test1.txtの再ビルド実行時、dep1.txtが最新化(ここでは新規作成)されたことに影響してtest1.txtの更新処理が実行されます。
$ ninja test1.txt -v
[1/2] echo "DEP sample" > dep1.txt
[2/2] cat dep1.txt > test1.txt
# text2.txtの再ビルドの実行時、dep2.txtは最新化(ここでは新規作成)しましたが、test2.txtの更新処理は行われません。
$ ninja test2.txt -v
[1/1] echo "DEP sample" > dep2.txt
動的依存性(Dynamic Dependency)
#次は、依存ファイルを動的に指定する機能を紹介します。
ビルド処理の中で、 依存性を表すためのbuild文の一覧のようなファイルを生成し、そのファイルを参照して依存関係を追加できます。
例をドキュメントから拝借しますが、以下の設定ではtarボールの展開処理をしています。
この設定では、tarボールが前回展開したときから更新があった場合に再展開します。
また、tarボールに更新がなかったとしても以前展開したはずのファイルがなんらかの理由で存在していない場合にも再展開します。
rule untar
command = tar xf $in && touch $out
rule scantar
command = scantar --stamp=$stamp --dd=$out $in
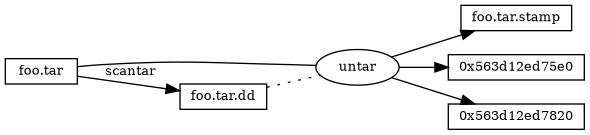
build foo.tar.dd: scantar foo.tar
stamp = foo.tar.stamp
build foo.tar.stamp: untar foo.tar || foo.tar.dd
dyndep = foo.tar.dd
少し複雑ですので、処理を追って説明していきます。
まず最初にninja foo.tar.stampを実行することで次のbuild文が評価されます。
build foo.tar.stamp: untar foo.tar || foo.tar.dd
dyndep = foo.tar.dd
untarが展開処理を実行するルールです。 展開実行と同時にタイムスタンプ記録用にfoo.tar.stampを作成します。
dyndep =というのが組み込みのキーワードなのですが、ここで指定されたファイルfoo.tar.ddには指定の書式[3]で追加のターゲットや依存ファイルが記述されている想定です。このfoo.tar.ddをtarボールの内容によって動的に生成します。
生成するためにここではfoo.tar.ddをOrder-Only Dependencyとして指定します。
次にfoo.tar.ddのビルド処理として以下のbuild文が評価されます。
build foo.tar.dd: scantar foo.tar
stamp = foo.tar.stamp
scantarというコマンドはここでは仮想的に用意されていると仮定したコマンドです。このコマンドはtarボールを読込みその内容に応じて以下のようなファイルを生成するものとしています。(例えばtar tfの結果を加工する)
ninja_dyndep_version = 1
build foo.tar.stamp | file1.txt file2.txt : dyndep
restat = 1
file1.txt,file2.txtがtarボールに含まれていたファイル名であり、それらを(暗黙的な)ターゲットファイルとして追加することを記述しています。
このようにしてtarボールの内容によって動的に依存関係を指定できます。
依存関係グラフは以下のようになります。(file1.txt,file2.txtを指すはずのターゲットノードがよくわからない数値になっていますね。バグでしょうか…)
並列実行
#Ninjaではビルド実行をデフォルトで並列実行してくれます。
ファイル生成も行わない簡単な例になりますが、以下のような設定ファイルで動作を確認してみます。
rule r1
command = sleep 2 && echo "r1 `date +%H:%M:%S`"
rule r2
command = sleep 2 && echo "r2 `date +%H:%M:%S`"
rule r3
command = sleep 2 && echo "r3 `date +%H:%M:%S`"
build tag: phony tag1 tag2 tag3
build tag1: r1
build tag2: r2
build tag3: r3
ターゲットtagは3つの依存ファイルtag1、tag2、tag3に依存していて、
それぞれの依存ファイルのルールr1、r2、r3において、2秒待機して時刻を出力します。
$ ninja tag
[1/3] sleep 2 && echo "r1 `date +%H:%M:%S`"
r1 19:49:04
[2/3] sleep 2 && echo "r2 `date +%H:%M:%S`"
r2 19:49:04
[3/3] sleep 2 && echo "r3 `date +%H:%M:%S`"
r3 19:49:04
出力の時刻の秒数まで見ていただくと分かると思いますが、並列で実行されているため全て同時刻で出力されました。
ツールオプションについて
#上記で依存性グラフを画像出力するときにも使いましたが、ninjaコマンドには-tオプションで使える便利ツールが用意されています。
browse- 依存関係グラフをブラウザで表示できる
ninja -t browse --port=8000 --no-browser mytarget(手元ではなぜか実行エラーになる💦)
graph- graphviz形式の依存グラフを出力する
ninja -t graph mytarget | dot -Tpng -ograph.pngsudo apt install graphviz -yでdotをインストール
targets- ターゲット一覧出力
commands- 与えたターゲットのコマンド一覧出力
inputs- 与えたターゲットの入力ファイル一覧
clean- 成果物を削除する
おわりに
#今回はビルドシステムツールのNinjaを触ってみた内容をまとめました。まだ他にも細かな仕様がありますので気になる方はマニュアルをご覧ください。
設計目的にもあるように基本的にはNinjaの設定ファイルは手書きしないようなのですが、読み方や実行方法等が理解できて面白かったです。 特に依存関係グラフを出力できるのは便利でこれだけでも何かに使えそうだなと思いました。
Makefileと比べて依存関係の解決がとても高速であるということなので、何か機会があれば使ってみたいなと思いました。